







更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
标题:MR-ULINS: A Tightly-Coupled UWB-LiDARInertial Estimator with Multi-Epoch Outlier Rejection
-
作者:Tisheng Zhang, Man Yuan, Linfu Wei, Yan Wang, Hailiang Tang*, Xiaoji Niu
-
作者单位:武汉大学
-
文章链接:https://arxiv.org/pdf/2408.05719
2.摘要
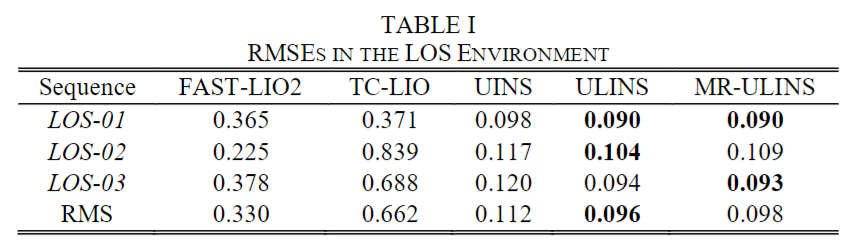
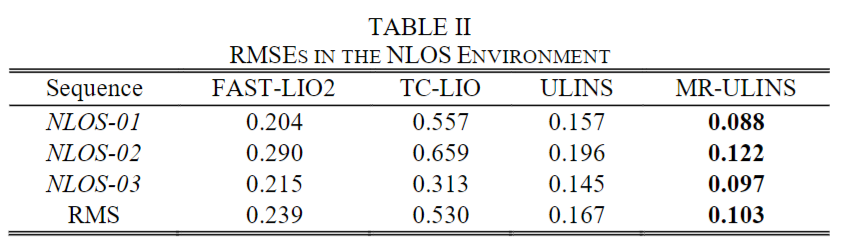
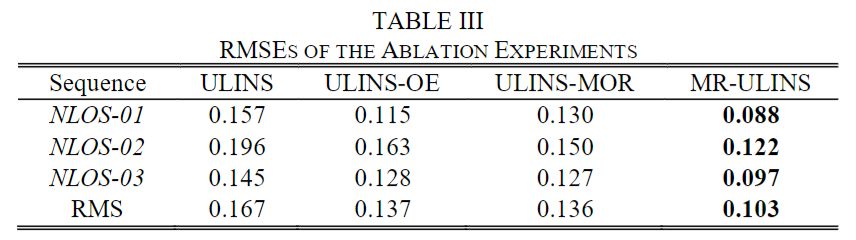
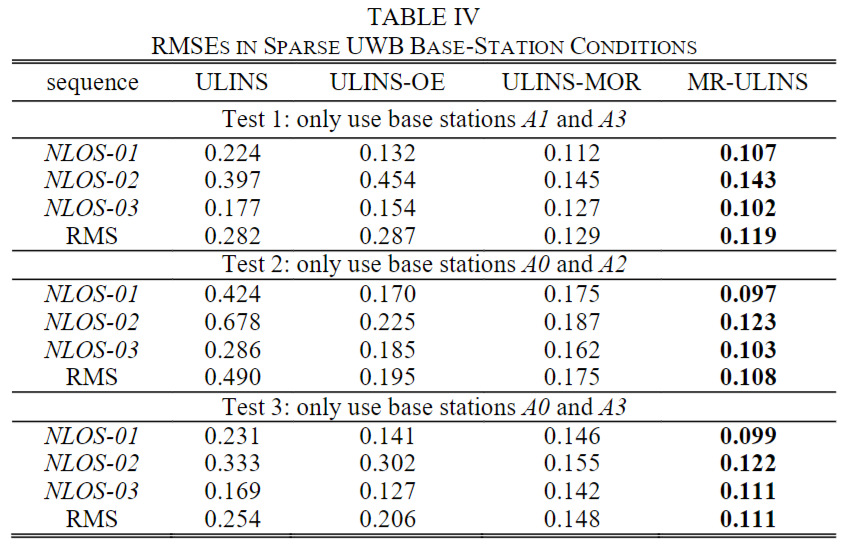
激光雷达惯性里程计(LIO)和超宽带(UWB)已经集成在一起,以实现在全局导航卫星系统(GNSS)拒止环境中的无漂移定位。然而,UWB可能会受到系统性距离误差(如时钟漂移和天线相位中心偏移)以及非视距(NLOS)信号的影响,导致鲁棒性降低。在这项研究中,我们提出了一种UWB-激光雷达-惯性估计器(MR-ULINS),它在多状态约束卡尔曼滤波器(MSCKF)框架内紧密集成了UWB距离、激光雷达帧间和IMU测量。系统性距离误差被精确建模以在线估计和补偿。此外,我们提出了一种利用LIO相对精度的UWB NLOS多周期异常值剔除算法。具体来说,LIO的相对轨迹被用来验证滑动窗口内所有距离测量的一致性。广泛的实验结果表明,MR-ULINS在复杂的室内环境中,在严重的NLOS干扰下实现了约0.1米的定位精度。消融实验表明,在线估计和多周期异常值剔除可以有效地提高定位精度。此外,MR-ULINS在激光雷达退化场景和UWB挑战条件下,即使在基站稀少的情况下,也保持了高精度和鲁棒性。
3.主要贡献
-
提出了一个在MSCKF框架内的UWB-激光雷达-惯性估计器,它紧密集成了IMU、激光雷达和UWB距离测量。UWB系统性距离误差被建模为偏差和比例因子,并在线估计以进一步提高定位精度;
-
设计了一种基于RANSAC的多周期异常值剔除算法用于UWB。利用LIO的短期高精度相对轨迹来验证多周期UWB距离的一致性,从而减轻UWB NLOS的影响。所提出的算法对绝对姿态误差免疫,在UWB基站稀疏的条件下有效;
-
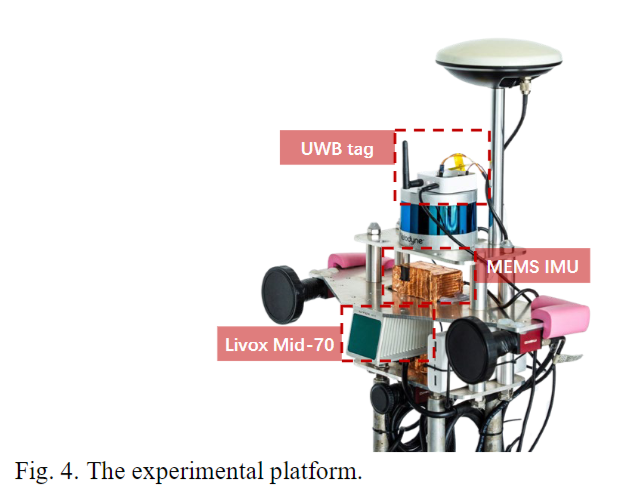
在视距(LOS)、非视距(NLOS)和基站稀疏的环境中进行了广泛的现实世界实验。结果表明,所提出的MR-ULINS具有高精度,并有效减轻了UWB系统性距离误差和NLOS的影响。
4.核心思想与方法
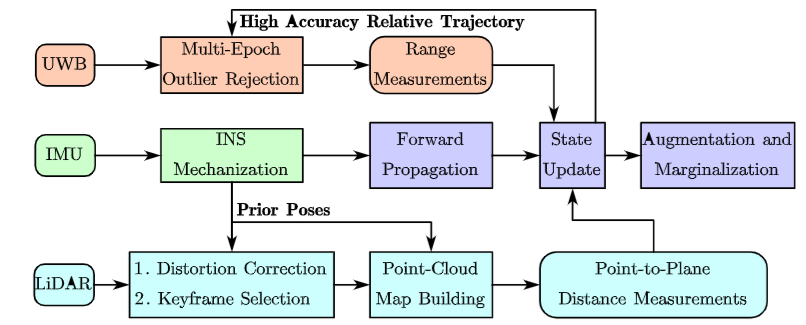
采用了以惯性导航系统(INS)为中心的处理流程。系统在一个局部世界坐标系中运行,其原点是惯性测量单元(IMU)的初始位置,z轴被选择为与重力对齐。一旦INS初始化完成,就执行INS机制化以获得高频率的INS姿态,并且状态向量及其协方差被前向传播。
当接收到激光雷达(LiDAR)帧时,点云畸变会根据之前的INS姿态进行校正。此外,INS姿态也被用于关键帧的选择。如果当前帧与前一个关键帧之间的相对运动或时间间隔超过设定阈值,则当前帧被视为关键帧。当选择一个激光雷达关键帧时,前一个关键帧和当前关键帧之间的所有非关键帧都被合并到前一个关键帧中,以构建关键帧点云地图。然后,在激光雷达滑动窗口内,当前关键帧与历史关键帧点云地图之间进行帧间关联。因此,可以利用激光雷达F2F点对平面距离测量模型来更新MSCKF状态。
同时,UWB距离测量通过估计的系统性范围误差进行补偿。校正后的距离测量和当前姿态用于构建UWB关键帧。当UWB滑动窗口中距离测量的数量足够进行UWB更新时,执行所提出的多周期异常值剔除,以去除由NLOS等误差引起的异常值。最后,经过精炼的距离测量被用来更新MSCKF状态,并消除LIO的漂移。
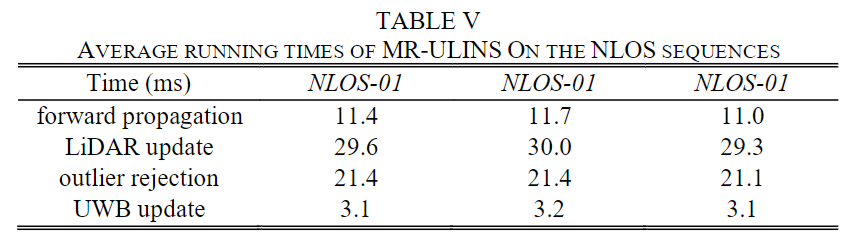
在激光雷达/UWB测量更新之后,相应时间的IMU姿态状态被增加到MSCKF状态向量中。此外,当激光雷达/UWB滑动窗口超过其最大长度时,进行边缘化处理以保持计算效率。
image
5.实验仿真验证
image
image
image
image
image
image
6.总结 && 展望
本文提出了MR-ULINS,一个在MSCKF框架内紧密耦合的UWB-激光雷达-惯性估计器。激光雷达测量模型通过F2F数据关联构建相对约束。绝对定位传感器UWB可以无缝集成以消除累积误差。UWB系统性距离误差被精确建模,以在线估计和校准,从而提高定位精度。同时,通过采用所提出的多周期异常值剔除,显著减少了UWB NLOS的影响。MR-ULINS在LOS和NLOS环境下,在UWB基站分布条件相同的情况下,展示了相似的精度,即大约0.1米。此外,MR-ULINS在激光雷达退化场景和UWB基站稀疏条件下展示了卓越的鲁棒性。我们将在未来的工作中集成GNSS,以实现无缝的室内外定位。
星球优质文章推送
-
一种基于聚类导向特征点的激光里程计与建图方法
-
【综述】首个全面综述!移动机器人的全局激光雷达定位:最新进展与未来方向综述
-
3D世界中的智能导航:激光雷达-视觉-惯性SLAM与全局一致性地图构建
-
独家重磅!位姿图优化中的异常边剔除:从2012年至今的鲁棒性提升策略
-
基于图的对象级视觉SLAM重定位

本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线
















 4557
4557

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









