







 本文介绍了轮式移动机器人的基础概念,包括坐标系转换、双轮差速移动机器人的运动学模型。重点阐述了机器人轨迹跟踪控制过程,通过控制输入和位姿误差方程实现期望轨迹的逼近。同时,提到了切换函数和滑模控制器的设计在轨迹跟踪中的应用,并提及了仿真实验的效果。
本文介绍了轮式移动机器人的基础概念,包括坐标系转换、双轮差速移动机器人的运动学模型。重点阐述了机器人轨迹跟踪控制过程,通过控制输入和位姿误差方程实现期望轨迹的逼近。同时,提到了切换函数和滑模控制器的设计在轨迹跟踪中的应用,并提及了仿真实验的效果。
一、机器人坐标系
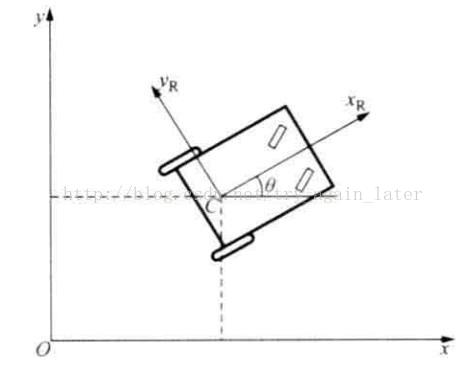
全局参考坐标系:以点o为原点,相互正交的x、y轴建立全局参考坐标系
局部参考坐标系:为确定机器人位置,选择C点为位置参考点,{Xr,Yr}定义机器人底盘相对于C的两个轴。
机器人姿态描述为ξ1=[x,y,Θ]T,为了根据分量的移动描述机器人的移动,需要从全局坐标系中映射成局部参考坐标系
即:ξR=R(Θ)ξ1,其中正交旋转矩阵R(Θ)为
二、双轮差速移动机器人运动学模型
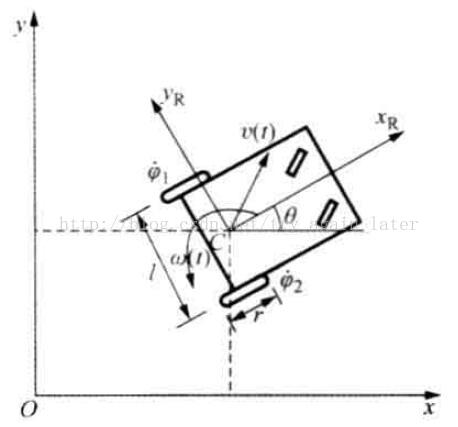
假设C点与机器人重心重合,机器人有两个主动轮子,直径r,轮间距为l;
左右轮运动速度分别为VL和VR,则角速度w(t)=(VR-VL)/l, 线速度v(t)=(VR+VL)/2;
那么由局部参考坐标系到全局参考坐标系的映射为:

三、机器人轨迹跟踪控制
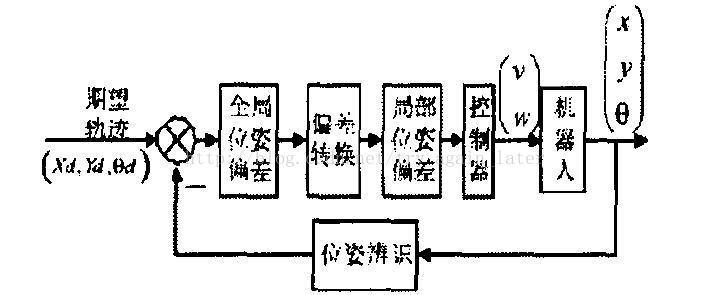
上图为机器人运动控制系统的方框图。首先给定期望轨迹,确定机器人控制输入v和w,然后识别出机器人位资坐标(x,y,Θ),将当前位资坐标和期望位资进行比较得到全局位资偏差,然后通过变换矩阵从全局位资偏差映射到局部位资偏差。在经过控制控制算法矫正得到控制输入v和w,反复过程直到实际位资镇定到期望位资为止。
机器人位资误差方程为:
Xe=(Xr-X)cosΘ+(Yr-Y)sinΘ
Ye=-(Xr-X)sinΘ+(Yr-Y)cosΘ
Θe=Θr-Θ
位资误差微分方程为:</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 850
850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









