







一、
【问题描述】:
博主将turtlebot_node.py里的has_gyro值改为False,再用cp命令将之替换掉了/opt/ros/indigo/lib里的turtlebot_node.py,随后不久出现了以下问题
连上turtlebot运行下列语句
$ roslaunch turtlebot_bringup minimal.launch卡在如下位置:
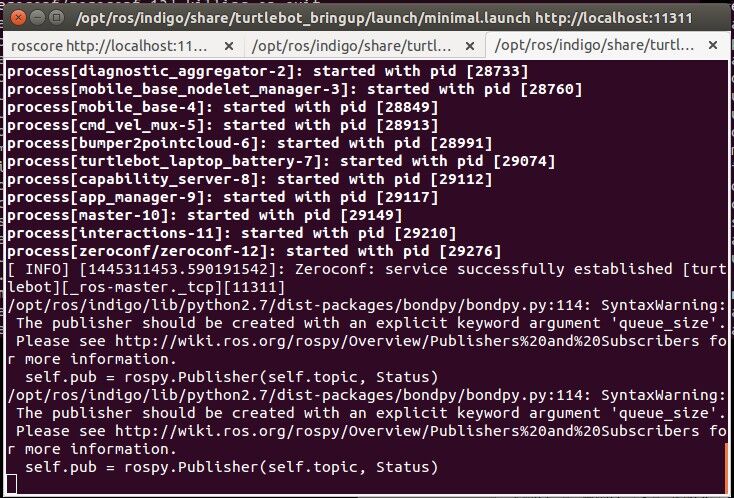
[ INFO] [1445311453.590191542]: Zeroconf: service successfully established [turtlebot][_ros-master._tcp][11311]
/opt/ros/indigo/lib/python2.7/dist-packages/bondpy/bondpy.py:114: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.pub = rospy.Publisher(self.topic, Status)
/opt/ros/indigo/lib/python2.7/dist-packages/bondpy/bondpy.py:114: SyntaxWarning: The publisher should be created with an explicit keyword argument 'queue_size'. Please see http://wiki.ros.org/rospy/Overview/Publishers%20and%20Subscribers for more information.
self.pub = rospy.Publisher(self.topic, Status)如下图:
【解决方案】:
【补充】经过验证,如果没有source turtlebot的工作空间运行minimal.launch的时候就会出现卡在上图的情况,解决办法是在.bashrc末尾加入source语句:
$ gedit ~/.bashrc然后在.bashrc末尾加入如下语句,注意顺序
$ source ~/turtlebot/devel/setup.bash——2015.10.23
【订正】:以下重装ROS的方案不是解决前述报错的最佳方案,如遇以上错误请按照2015.10.23补充说明修改。以下内容仅为重装ROS及Turtlebot包的参考
由于目前ROS下还没有办法方便的将一个工作空间中的所有包同时卸载,除非逐个找出turtle
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 467
467

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









