







论文:AprilTag: A robust and flexible visual fiducial system
三 检测器-单应矩阵和外参估计
III DECTOR-C Homography and extrinsics estimation
作者计算 3 ∗ 3 3*3 3∗3的单应矩阵,该矩阵可以将齐次坐标形式的2D点从Tag坐标系转换到2D图像坐标系(猜测这里的Tag坐标系原点为标签正中心,右下分别为XY,相机正前方为Z。在此坐标系下,Tag的中心点坐标为 [ 0 , 0 , 1 ] T [0, 0, 1]^T [0,0,1]T, 而且标签在XY方向拓展了1个单位?)。单应矩阵的计算采用DLT(Direct Linear Transform, 直接线性变换)算法。需要主要的是此处的单应矩阵转换的点坐标是齐次坐标形式,所以这些点的坐标仅按比例尺定义(也就是物理坐标与实际相差一个比例尺)。
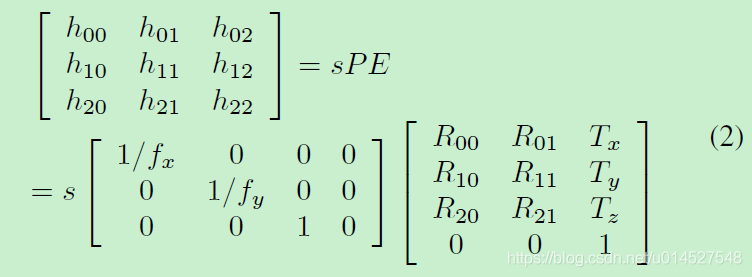
在计算标签的位置和姿态信息时需要知道:1)相机的焦距;2)标签的物理尺寸。基于DLT计算的
3
∗
3
3*3
3∗3单应矩阵可以重写为
3
∗
4
3*4
3∗4的相机内参矩阵
P
P
P(假设已知)和
4
∗
3
4*3
4∗3的截断外参矩阵
E
E
E。本来外参矩阵典型的是
4
∗
4
4*4
4∗4,但是由于标签上的每个位置在Tag坐标系下的z向坐标都等于0。因此,将每个Tag坐标重写为Z向为0的2D齐次坐标,而且移除了外参矩阵的第3列,剩余的便是截断外参矩阵。外参矩阵E的的旋转分量表示为
R
i
j
R_{ij}
Rij,位移分量表示为
T
k
T_k
Tk。未知的尺度因子为s:
需要注意的是,我们不能直接求解出
E
E
E,因为P是不满秩矩阵。但是可以拓展等式的右手边,写出
h
i
j
h_{ij}
hij的表达式如下:
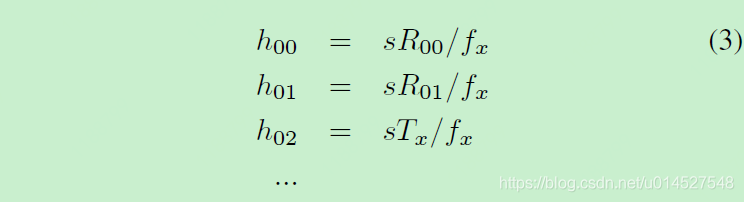
这样的话能够比较容易的计算出
R
i
j
R_{ij}
Rij的元素和
T
k
T_k
Tk的元素,除了尺度因子s。但是,由于旋转矩阵的列必须是单位向量,所以可以基于此抑制s的幅值。此处有旋转矩阵中的两列信息,可以计算s作为其两列幅值的几何平均值
a
b
\sqrt{ab}
ab。s的符号可以通过要求标签出现在相机的前方来恢复,比如Tz<0的位置。旋转矩阵的第3列可以通过计算已知两列的叉乘计算得出,因为旋转矩阵是正交的。
DLT步骤和上面的归一化步骤不能保证旋转矩阵严格正交。为了对此进行修正,作者计算了矩阵 R R R的极分解,其可生产一个误差的Frobenius矩阵范数最小的旋转矩阵。

















 1230
1230

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









