







旋转是对物体的一种操作,而朝向则是物体的一种状态,在对物体进行旋转时就会改变物体的朝向状态。
一、欧拉角
我们可以很快的构建一个旋转矩阵来对物体进行旋转,但在进行矩阵的构建时难度却很大,我们需要获取旋转轴的朝向等是非常困难的。
欧拉角的核心思想是将需要旋转的角度分为绕坐标轴的三个坐标轴旋转的三个角度的组合。是一由单个单独的旋转矩阵组合起来的旋转矩阵。
欧拉角的三个轴旋转顺序通常规定为:
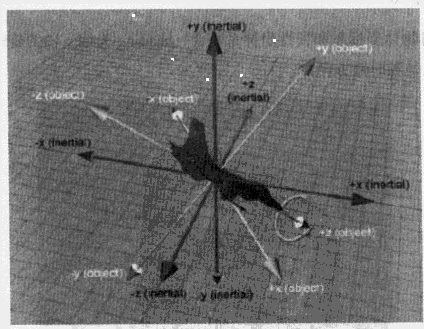
1、先绕heading : 绕Y轴正轴旋转一定角度
2、再绕pitch :绕X轴正半轴旋转一定角度
3、最后绕bank :绕Z轴正半轴旋转一定角度
注释 :当我们使用左手坐标系时,四指的方向则是旋转的方向。
欧拉角的缺点 :在使用欧拉角进行旋转时,会产生一个问题,那就是万象死锁节,所以在使用欧拉角进行旋转时必须限制旋转量。
欧拉角的优点 :只使用三个数来表示旋转量和方位,简单方便使用。















 2713
2713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









