






- 新建ros工作空间
- 下载git官方代码
git clone https://github.com/ethz-asl/kalibr.git
- 下载sample里IMU内外参文件
kalibr工具开源代码
kalibr使用教程1
kalibr使用教程2
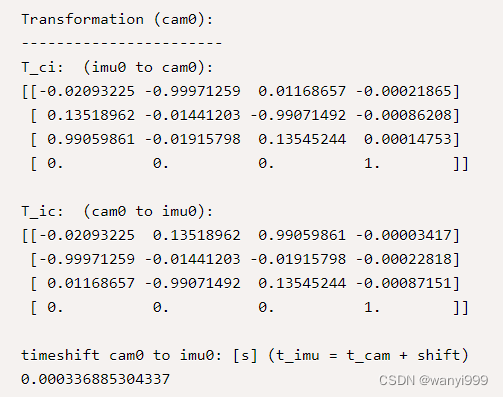
标定出来的参数包括imu_cam, cam_imu以及cam和imu的初始时间差
踩过的坑:
- Uubuntu 20.04 ROS 配套下载的opencv 4.2版本,kalibr开源代码里边用的是opencv2,需要修改opencv2中和opencv4不适配的函数。
- python库问题 ModuleNotFoundError















 643
643











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









