







1.基本概述
基本知识:机器人的机械结构是通过使用各种类型的关节(joints),将一组称为连杆(links)的物体相互连接起来。执行器(actuator)提供了使得机器人连杆运动的力或者力矩。末端执行器(end-effector)(比如抓握和操纵物体的手)附着在特定的连杆上。
构形空间:关于机器人的构形空间,其根本问题是回答机器人在哪里?以下为三个例子。
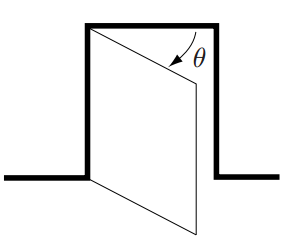 | 门的构形可以由1个数字表示,围绕其铰链的角度θ表示。其构形空间就是【0,2π】 |
|
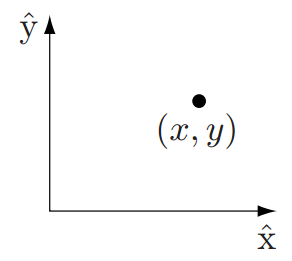
| 平面上的点的构形可以由两个坐标(x,y)描述。其构形空间就是能达到所有点的位置坐标集合。 |
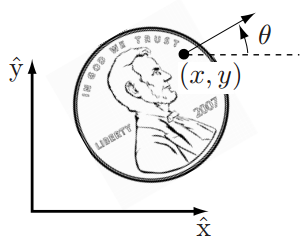 | 躺在平桌上的硬币的构形可以通过三个坐标来描述:两个坐标(x,y)指定了硬币上特定点的位置,一个坐标(θ)指定了硬币的方向。其构形空间就是所有(x,y,θ)坐标的集合 |
定义2.1:机器人的构形(configuration)是对机器人各点位置的完整描述。表示构形所需的最小实值坐标数n为机器人的自由度(dof)。包含机器人所有可能构形的n维空间称为构形空间(C-空间)。机器人的构形由其C空间中的一个点表示。
个人理解:C空间是一个数学模型,它把机器人的位置和姿态用一组参数来表示。这些参数可以是关节的角度、位置坐标或者其他描述机器人状态的变量。
2.1 刚体的自由度
(刚体:在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体。刚体自由度就是描述这个刚体需要用到最少的位置坐标的数量)
一个在三维空间中运动的刚体,我们称之为空间刚体,有六个自由度。类似地,在二维平面中运动的刚体,我们称之为平面刚体,有三个自由度。
刚体自由度计算公式:自由度 = 自由度之和 - 独立约束的数量。
2.2 机器人的自由度
| 以这个门为例,前面提到这个门只有一个自由度。但我们想象一下,这个门实际上是通过一个铰链接头(关节)与墙壁连接。没有这个铰链,门相当于是一个空间刚体,具有6个自由度。但是由于铰链的存在,对门的运动施加了五个独立的约束,仅留下一个独立的坐标(θ)。 |
在上面这扇门的情况中,我们可以知道关节限制了刚体的自由度,从而较低了整体的自由度。由此我们清楚,可以通过计算刚体(增加自由度)和关节(减少自由度)的数量来确定机器人自由度的数量。前面介绍完刚体,下面我们开始介绍关节。
2.2.1 机器人的关节
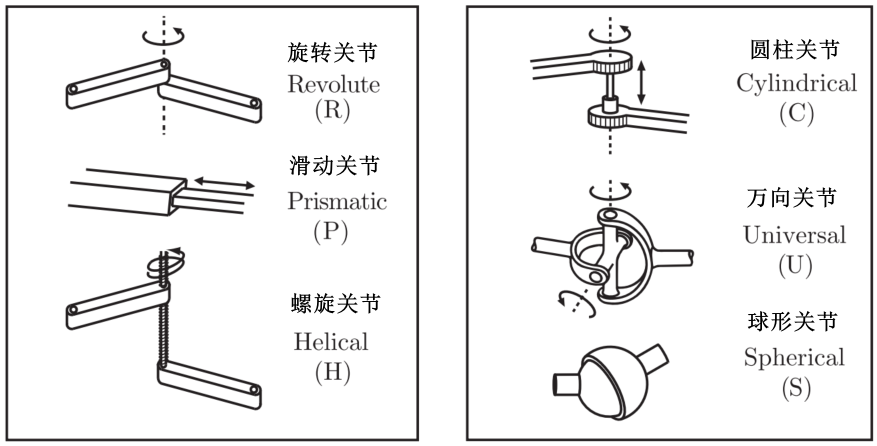
值得注意的是,我们可以将可以将关节视为提供自由度,以使一个刚性的身体相对于另一个身体移动;它也可以看作是对其连接的两个刚体的可能动作提供约束;
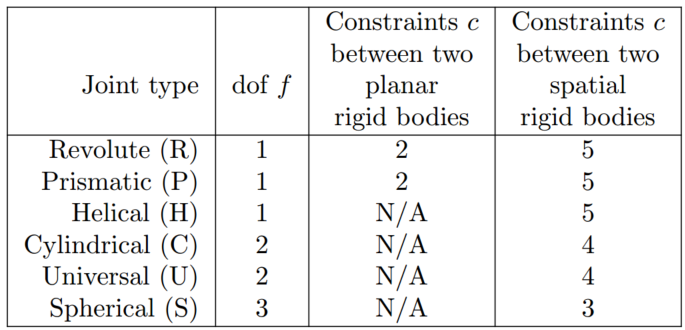
这个表中也同样提到,不仅提到了每个关节的自由度数量,同时也说明了该关节对刚体提供的约束。同时,需要满足关节的自由度的数量与关节提供约束的数量,要等于平面刚体或者空间刚体数量的总和。
(个人理解:关节连接两个刚体,关节的自由度就是一个刚体相对于另一个刚体运动的自由度;如旋转关节中,一个刚体相对于另一个刚体只能旋转,所以只有一个自由度)
2.2.2 Gubler 公式
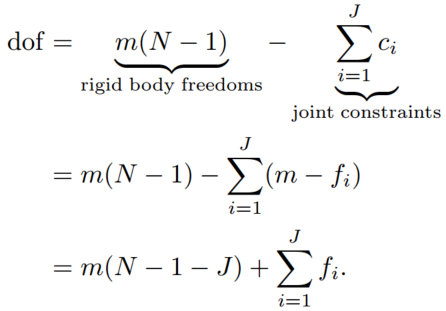 | m(对于平面刚体的m = 3,空间刚体m = 6);N(连杆的数量);J(关节的数量);ci(关节i提供约束的数量);fi(关节i提供自由度的数量);fi+ci=m. 为何要N-1?这里我的理解是,机器人通常有个固定的基座,不参与运动,需要减去。 |
开链机构:没有形成闭合回路的机构(如串联机构,想象人体的一只手臂在空间中自由摆动)
闭链机构:形成闭合回路的机构(想象一下,人体的左右两只手臂,手挽手形成一个闭合的回路)
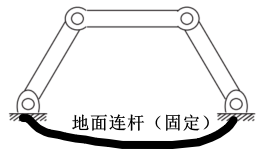 | 看上去,这个机构是三连杆机构,但实际上需要把地面也算上,地面是一个固定的连杆,所以是一个4连杆机构,具有4个关节。所以根据Gubler公式计算: 3*(4 - 1 - 4) + 4 = 1 (平面机构,m=3;旋转关节,fi=1) |
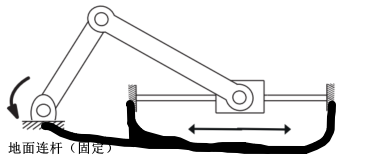 | 可以看作四连杆机构(滑块和地面分别都是单独的连杆),4个关节(三个旋转,一个滑动)自由度计算: 3*(4-1- 4) + 4 = 1 |
练习:
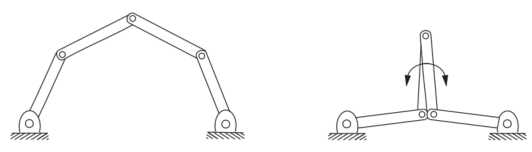
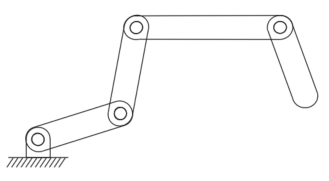 | 平面机构,m =3;五连杆,N=5;四关节,J=4;都是旋转关节,fi=1;此为开链机构 计算:3*(5-1-4)+4*1=4 |
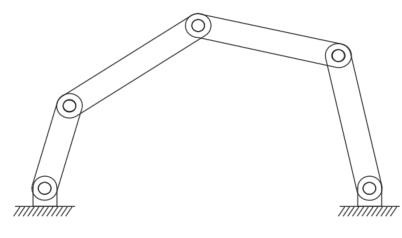 | 平面机构,m =3;五连杆,N=5;五关节,J=5;都是旋转关节,fi=1;此为闭链机构。 计算:3*(5-1-5)+5*1=2 |
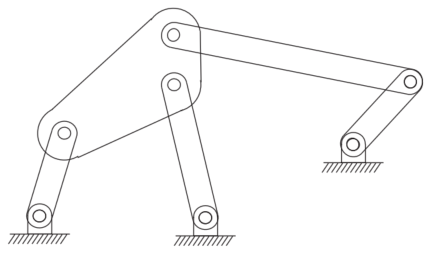 | 平面机构,m =3;六连杆(地面看作一个整体连杆),N=6;七关节,J=7;都是旋转关节,fi=1;此为闭链机构。 计算:3*(6-1-7)+7 =1 |
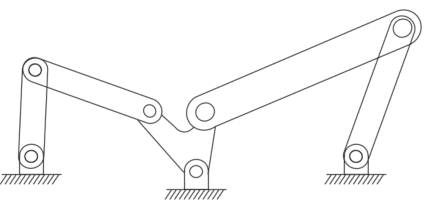 | 平面机构,m =3;六连杆(地面看作一个整体连杆),N=6;七关节,J=7;都是旋转关节,fi=1;此为闭链机构。 计算:3*(6-1-7)+7 =1 |
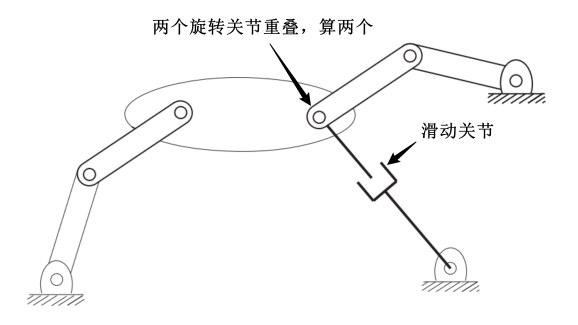 | 平面机构,m =3;八连杆(地面看作一个整体连杆),N=8;九关节,J=9;八个旋转关节,一个滑动关节,fi都=1;此为闭链机构。 计算:3*(8-1-9)+9=3 |
特殊情况:
 | 如果用公式计算: 3*5(5-1-6)+6=0,发现该机构自由度为0(自由度为零,称之为刚性结构);但是,显然该机构是可以进行一个自由度的运动的,这里我们要排除冗余约束的连杆和关节(即有没有它运动照样进行),重新计算: 3*(4-1-4)+4=1 |
 | 如果连接到地面的两个接头以某种固定角度锁定,则五杆连杆应成为刚性结构;如果两个中间链接的长度相同并相互重叠,这些重叠的链接可以在两个重叠的接头上自由旋转。这里称之为机器人的奇异点,会导致自由度丢失,控制失效 |
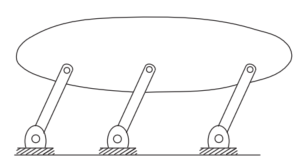
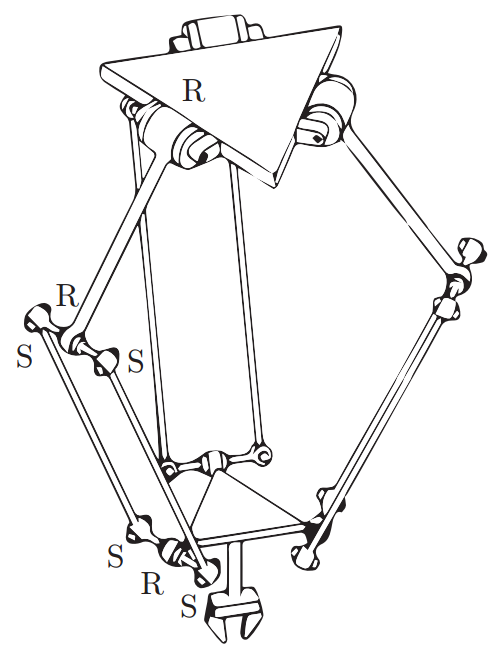
典型机器人:Delta 机器人和多自由度平台
|
| 主要组成:上平板(固定),下平板(可动),三条腿。 每条腿:包含3个旋转关节,4个球形关节,5根连杆。 由此可得,一共2+3*5=17根连杆,N=17;一共21个关节(9个旋转关节,12个球形关节),J=21;空间刚体m=6; 根据公式:6*(17-1-21)+9*1+12*3=15 但实际上,移动平台上的末端执行器中只有3个自由度(x-y-z方向上的平移),其他12个内部自由度是通过平行四边形中的12个连杆的扭转(三个腿中的每一个都有四个连杆的扭转),平行四边形的腿部设计可确保移动平台始终保持与固定平台平行 |
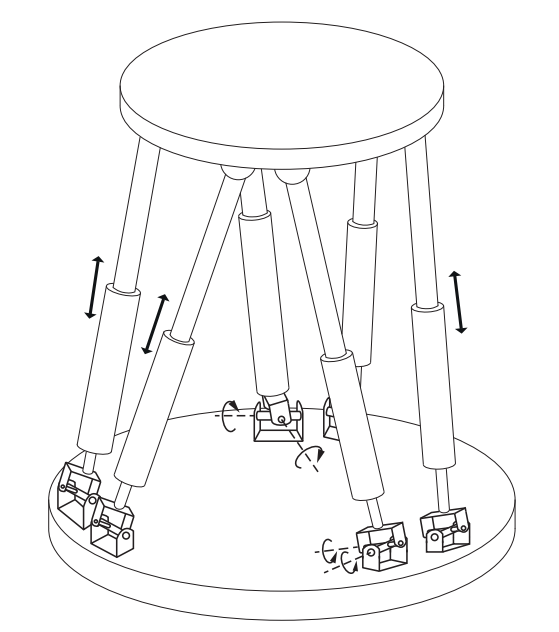 | 组成:14个连杆,18个(6个万向关节,6个滑动关节,6个球形关节) 自由度计算: 6*(14-1-18)+6*2+6*1+6*3=6 |
2.3 构形空间:拓扑和表示形式
2.3.1 构形空间拓扑
前面,我们一直在学习机器人的C空间(关注其维度和自由度),这里我们注意到,空间的形状也是非常重要的。
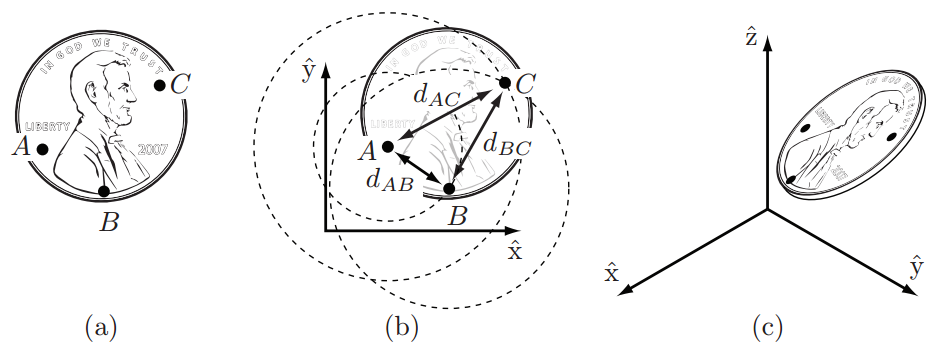
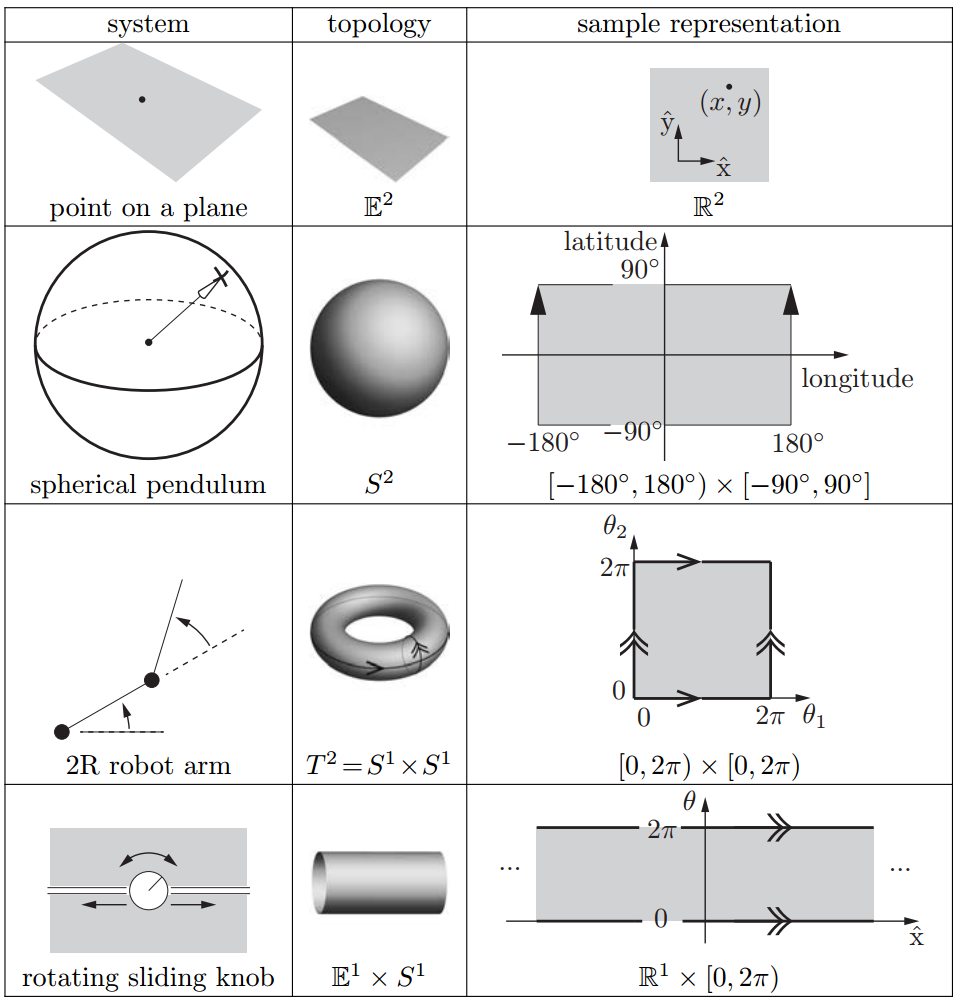
考虑一个问题:在球体表面上移动的点。点的C空间是二维的,因为构形可以通过两个坐标,纬度和经度描述。作为另一个例子,在平面上移动的点也具有二维C空间,坐标(x,y)。虽然平面和球的表面都是二维的,但显然它们的形状并不相同。
空间的拓扑是该空间本身的基本属性;例如,为了表示圆上的一个点,我们可以通过从圆的中心到点的角度θ提到点θ,相对于选择的零角度。或者,我们可以选择一个带有其原点位于圆的中心的参考框架,并以约束x^2 + y^2 = 1的约束表示要点。无论我们选择的坐标选择是什么,空间本身都不会改变.
这一块我没有去理解得很深,详细的推导和说明,大家可以看看原著,值得注意的是,拓扑学对于构形空间的表示非常重要。
2.4 构形与速度限制
我们首先考虑一个四连杆机构
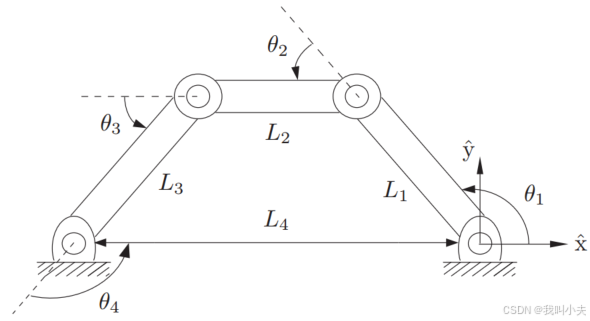 | 左图中的四连杆机构,可以由以下三个方程进行表示: x方向方程:各杆在x轴方向的投影之和为零。 y方向方程:各杆在y轴方向的投影之和为零。 角度和条件:四个杆的转角之和为2π,确保闭合性。 |
 |
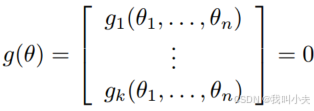
对于包含一个或多个封闭环的通用机器人,可以通过列向量隐式表示构形空间:
![]()
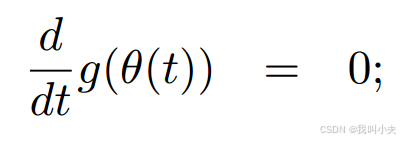
形成的闭环方程:
其中,k指的是k个独立方程(这里应该指的是k个独立回路方程),上述闭环方程对两边进行求导可得:
因此:
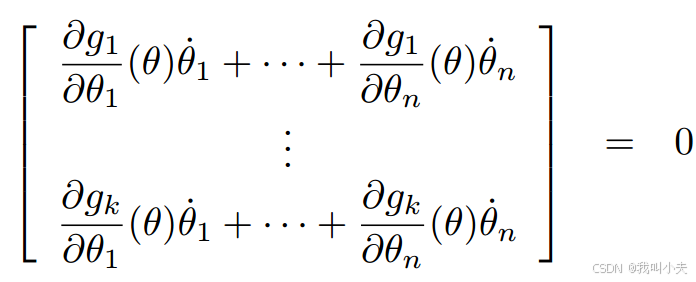
可以简写成:

最终简化:
![]()
其中A(θ)是g(θ)对θ的导数,同时g(θ)又是A(θ)的积分。
现在考虑一枚在在平面上滚动的直立硬币:
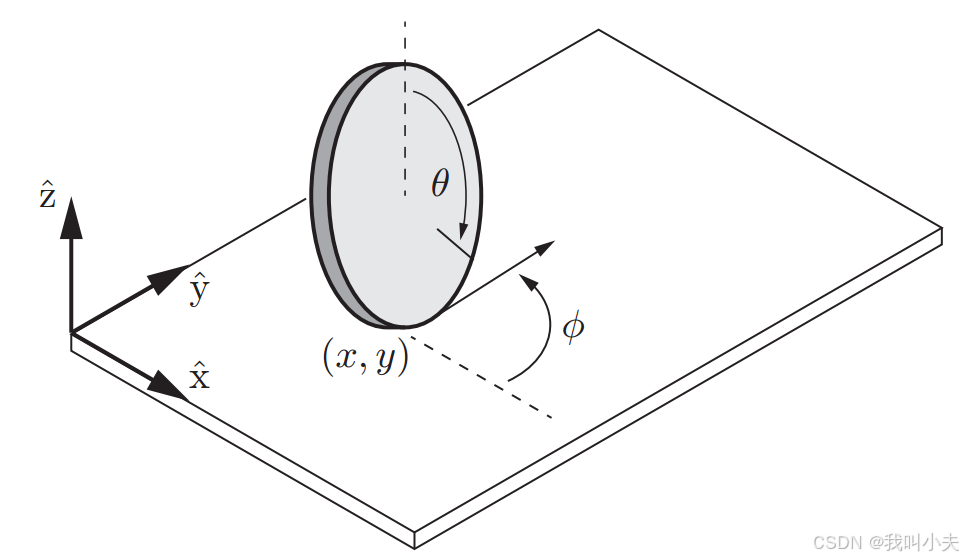
硬币的构形空间由四个参数描述,平面上的接触点(x,y),转向角φ和旋转角度θ。现在假设硬币只能滚动不滑动,因此可以得到以下关系:
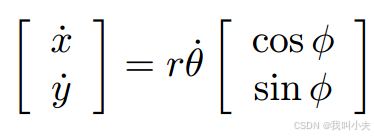
描述构形空间的四个参数可表示为:

前面我们已经知道
![]()
写成矩阵形式:1 * ẋ + 0 * ẏ + 0 * φ̇ + (-r cos φ) * θ̇ = 0;0 * ẋ + 1 * ẏ + 0 * φ̇ + (-r sin φ) * θ̇ = 0
即:
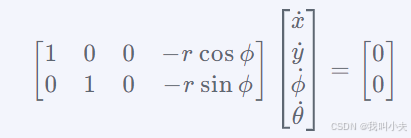
最终可得:
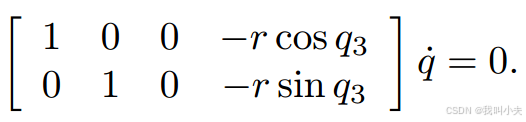
最终就化简成了A(q) = 0的形式,其中A(q)是2x4的实数矩阵。根据我们原先的推导,将矩阵的各项进行积分:

我们通过观察可以发现,这些条件之间是矛盾的,因此 不存在这样的函数 g1(q)。由于约束不可积,这些约束被称为 非完整约束(nonholonomic constraints)。非完整约束的特点是:
-
它们限制了系统的 速度(velocity),但 不减少系统可达的配置空间(C-space)的维度。
-
系统仍然可以在整个配置空间中移动,尽管其速度受到约束。
非完整约束在机器人学和控制理论中非常重要,因为它们描述了系统的动态行为,但允许系统在全局范围内具有较高的灵活性。例如:
-
汽车的转向和移动受到非完整约束(车轮不能横向滑动)。
-
移动机器人可以在平面上任意位置,但其速度受到轮子旋转的限制。
对非完整约束的个人理解:
非完整约束就像是给系统设置了一些“限制”,但这些限制并不会完全阻止系统到达某个位置,只是限制了它在移动过程中的方式。在硬币滚动的例子中,硬币不能滑动,只能沿着接触点滚动。这限制了它的速度方向,但它仍然可以在平面上的任何位置以任何角度停下来。这种约束就是非完整约束。
2.5 任务空间和工作空间
任务空间是一个可以自然表达的机器人任务的空间。例如,如果机器人的任务是用笔在纸上绘制,那么任务空间将为r 2。如果任务是操纵刚性的身体,那么任务空间的自然表示是刚体的C空间,代表机器人最终效果图的框架的位置和方向。这是任务空间的默认表示。如何定义任务空间的决定是由任务驱动的,独立于机器人。
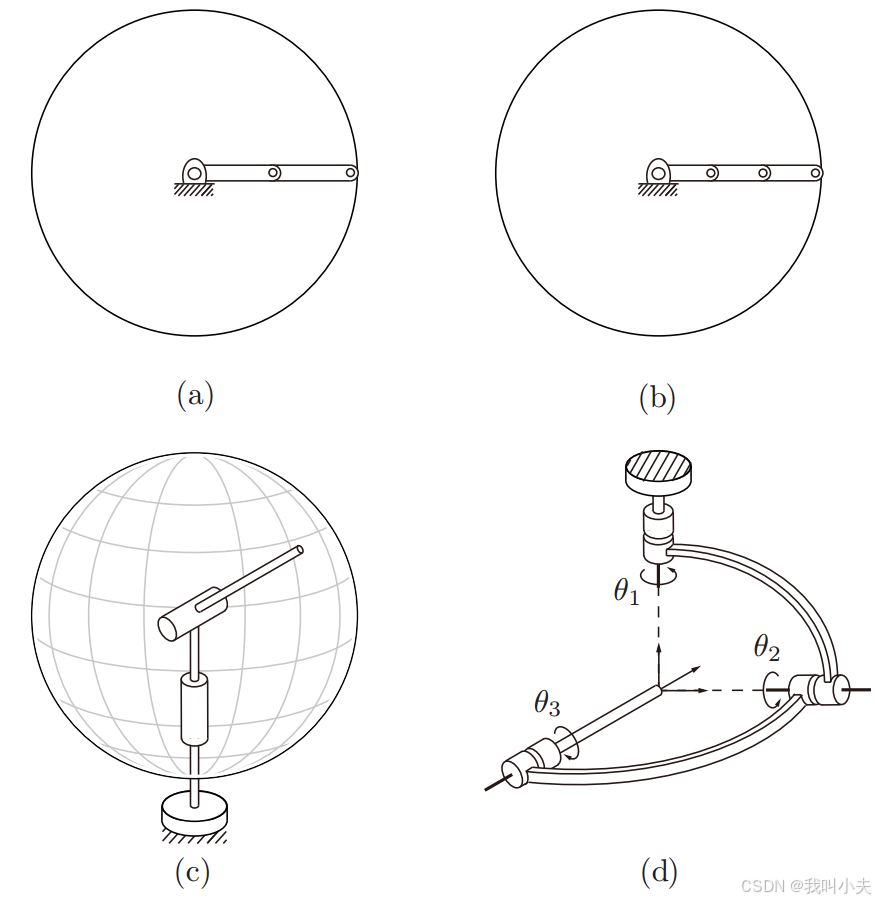
工作空间是机器人末端执行器可以达到的构形的范围。工作空间的定义主要由机器人的结构驱动,而不是任务。
下图为各种机器人的工作空间表示:
2.6 参考文献
MODERN ROBOTICS MECHANICS, PLANNING, AND CONTROL-Kevin M. Lynch and Frank C

















 3510
3510

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









