







ROS2发布了第一个正式版,发现支持的系统中有Win10,所以体验了一下。
安装过程有点长,不如ubuntu系统下一个命令就能搞定,好多依赖的库要自己安装,中间还出现了些小问题,记录一下。
安装说明网站为:
1. 安装Chocolatey,Chocolatey是一个在Windows系统下安装包的软件,具体安装过程参照官网点击打开链接,管理员模式打开CMD,安装官网安装教程复制输入即可,安装成功后,在CMD输入会有如下提示:
2. 用Chocolatey安装python
choco install -y python即可安装,安装的是Python3.6版本。
3.安装OPENSSL
非常简单,去相关网站下载即可,安装后设置好环境变量
一般都装过了,按照教程设置好就可以
5. 安装DDS Vendor
DDS的解释:https://en.wikipedia.org/wiki/Data_Distribution_Service
我这里选择的是 eProsima FastRTPS & Boost (only for beta-1 and older releases)
去安装好BOOST并设置好环境变量即可
6. OPENCV
一般也都装过了,设置好环境变量
7.安装依赖项
- asio.1.10.6.nupkg
- eigen-3.3.3.nupkg
- tinyxml-usestl.2.6.2.nupkg
- tinyxml2.4.1.0.nupkg
然后需要安装yaml,我在这里出现了问题,这是官网给出的:
python -m pip install -U pyyaml setuptools但是我在安装时,pyyaml安装不成功,最终例子虽然能运行但是提示缺少YAML。
后来找了一些安装包,但是没有python3.6的,最后找到了whl格式的文件,最终安装成功。
8. 下载ROS2
从官网下载好解压
9. 设置环境
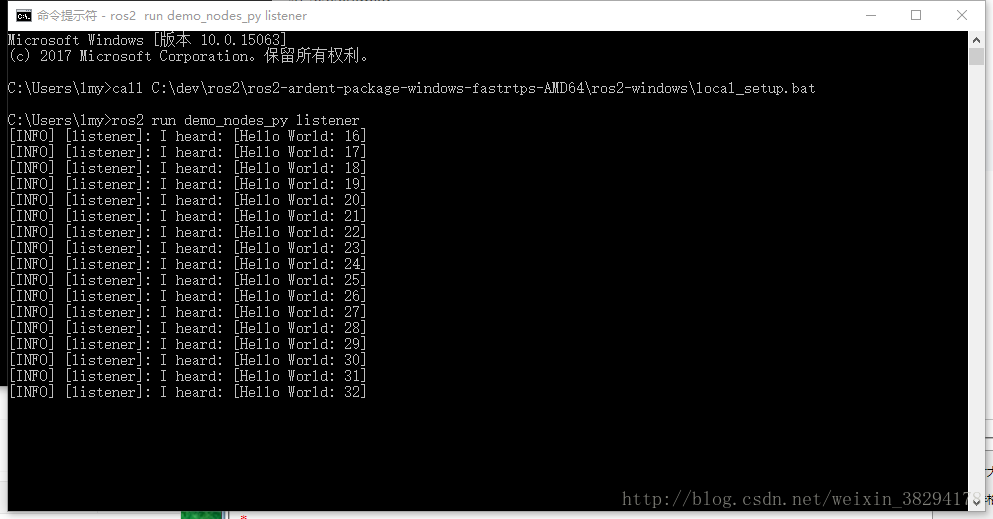
与ros中source相同,需要call local_setup.bat文件
之前用的POWERSHELL call命令不识别,后来用的cmd
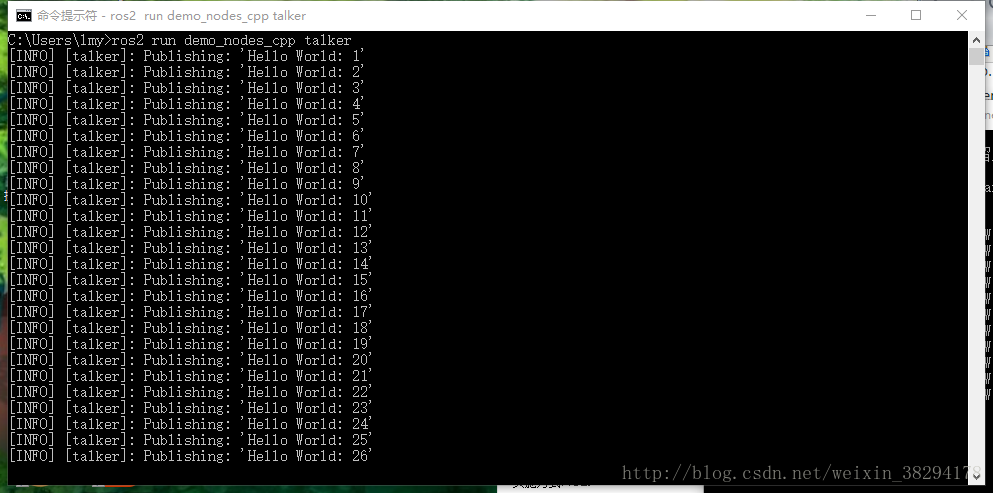
10. 测试例子
测试后成功















 7141
7141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









