







 本文介绍了机器人动力学中的凯恩方程,详细阐述了偏速度、偏角速度、广义主动力和广义惯性力的概念,并给出了它们的数学表达式。接着,讨论了广义关节转矩的定义。此外,还通过Matlab编程实现了六自由度串联机械臂的动力学建模,包括动力学反解和正解,验证了模型的准确性。仿真结果显示,期望与实际关节运动参数匹配良好。
本文介绍了机器人动力学中的凯恩方程,详细阐述了偏速度、偏角速度、广义主动力和广义惯性力的概念,并给出了它们的数学表达式。接着,讨论了广义关节转矩的定义。此外,还通过Matlab编程实现了六自由度串联机械臂的动力学建模,包括动力学反解和正解,验证了模型的准确性。仿真结果显示,期望与实际关节运动参数匹配良好。
十一、机器人凯恩方程动力学建模
11.1 凯恩方程
凯恩方程建立在分析力学的基础上,受拉格朗日原理的启发,以广义速度为自变量,引入了偏速度、偏角速度、广义主动力和广义惯性力的定义,建立了代数方程形式的动力学方程。凯恩方程可以描述为作用在系统中每个广义速度为零的广义主动力和广义惯性力之和。方程定义为:
其中,是广义主动力,
是广义惯性力。
凯恩方程法只要涉及以下内容概念:偏速度、偏角速度、广义主动力和广义惯性力以及广义关节转矩。
-
偏速度和偏角速度
假设是机器人系统的广义坐标,
和
是各连杆的系统速度和角速度,所以质心的偏速度和偏角速度如下:
其中,,
是连杆的数量,
是连杆
的系统性偏速度,
是连杆
的系统性偏角速度。
-
广义主动力
定义是广义主动力,表达式如下:
其中,和
的含义同上,
是主动力的和(摩擦力、重力和磁力),其作用在连杆
上。
-
广义惯性力
定义是广义惯性力,表达式如下;
其中,是连杆
的惯性力,
,
是连杆
的质量,
是连杆
的加速度。
-
广义关节转矩
定义是广义关节转矩,表达式如下:
其中,各变量的定义如上,是重力加速度,
是连杆
的惯性张量。
11.2 Kane方程Matlab编程
利用Matlab中的m语言,完成六自由度串联机械臂动力学建模,并实现动力学正逆解验证。
(1)动力学反解,输入是六个关节的期望轨迹的角度、速度、加速度,经过反解得到六个关节输出力矩。
(2)动力学正解,输入时上一级的六个关节输出力矩,经过正解得到六个关节的实际输出角度、速度和加速度。
(3)经过验证,期望角度和实际角度,期望速度和实际速度,期望加速度和实际加速度等完全一致,仿真结果验证了模型建立的准确性。
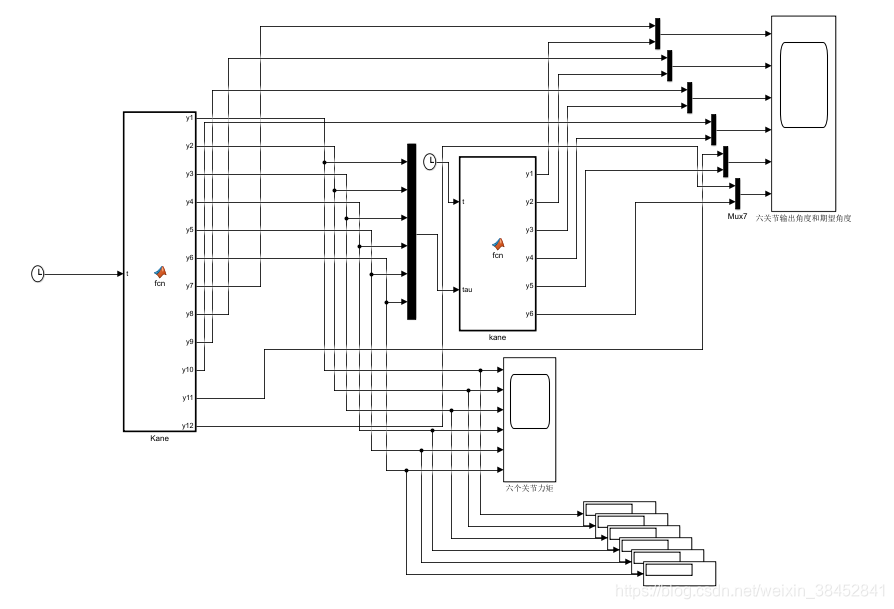
图1 基于Kane方程建立的六自由度串联机械臂Simulinkl仿真图
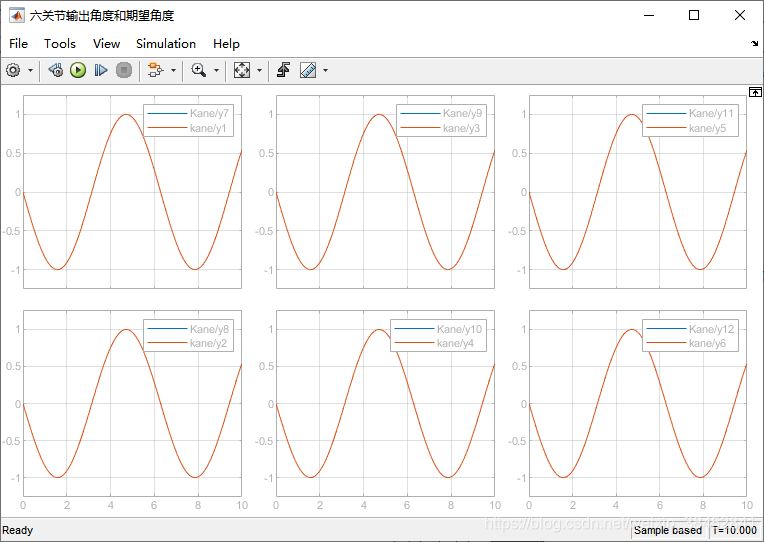
图2 六个关节的输出角度和期望角度对比

















 153
153

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









