







 FSRA(全时速自适应巡航控制)旨在通过自动控制车速与前车保持设定距离或速度,减轻驾驶员负担。文章详细阐述了FSRA的功能分级、状态跳转、功能要求,如静止或低速移动目标的处理、跟随能力、检测范围等,并介绍了基本的驾驶员接口和干预能力,以及相关的试验验证方法,确保系统的安全和性能。
FSRA(全时速自适应巡航控制)旨在通过自动控制车速与前车保持设定距离或速度,减轻驾驶员负担。文章详细阐述了FSRA的功能分级、状态跳转、功能要求,如静止或低速移动目标的处理、跟随能力、检测范围等,并介绍了基本的驾驶员接口和干预能力,以及相关的试验验证方法,确保系统的安全和性能。
简介
FSRA(全时速自适应巡航控制)的主要功能是控制车速与前方车辆(FV)的车速相适应。FSRA 的目的是实现车辆纵向控制的部分自动化以减轻驾驶员的工作量。
术语及定义
- Forward vehicle 前车FV
- time gap 时距t=c/v
 - FSRA off state FSRA 关闭状态
- FSRA off state FSRA 关闭状态 - FSRA stand-by state FSRA 待机状态
- FSRA active state FSRA 激活状态
- FSRA hold state FSRA 保持状态,车辆静止时 FSRA 处于激活态
- FSRA speed control state FSRA 速度控制状态,依据设定车速进行速度控制
- FSRA following control state FSRA 跟踪控制状态,系统依据设定的时间间隔控制与目标车辆的间距
- full speed range adaptive cruise control 全时速自适应巡航控制
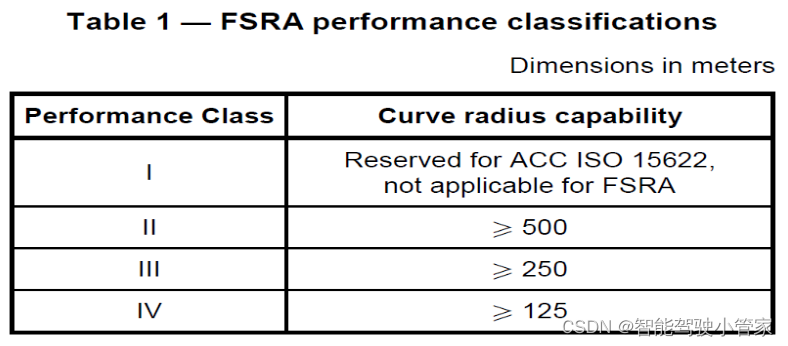
功能分级
根据不同的曲线能力,本标准规定 FSRA 可以分为如下表所示的等级。
状态跳转
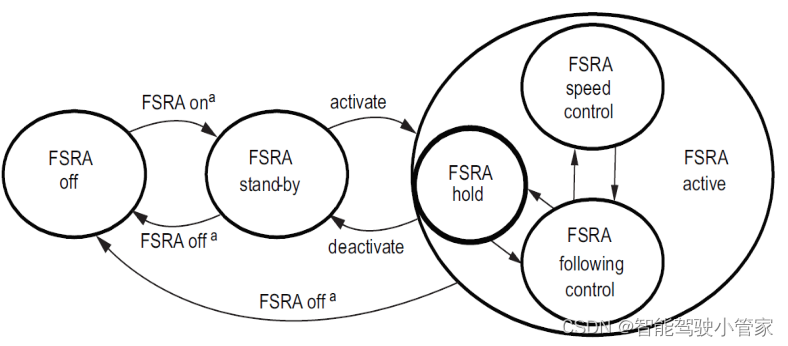
FSRA 系统必须至少提供以下控制策略和状态转换。以下条目构成 FSRA 的最基本的运行状况。
- 当 FSRA 激活时,车速可以自动控制在与前车保持设定距离或保持设定速度(以速度更低的为目标)。两种控制模式的切换由 FSRA 系统自动完成。
- 稳定状态下的车距可以系统自动调整,也可以由驾驶员调整
- 如果前方不止一辆车,系统必须自动选择跟踪目标
- SV 停车,系统必须在 3s 内将状态从跟踪控制切换到保持状态
- 在保持状态时,自动刹车控制必须启动,使 SV 保持静止<
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1282
1282

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











