








摄像机是3D世界到2D图像之间的一种映射。本部分总结一下单目摄像机基本针孔模型和理论推导,畸变:
目录

注意:成像平面放于相机主平面前面主要是便于建立数学模型
1.基本概念
光心:投影中心O为摄像机中心,也成为了光心。
主轴:摄像机中心到图像平面的垂线称为摄像机的主轴或主射线。
主心:主轴和图像平面的交点为主心
主平面:过摄像机中心且平行于图像平面的平面称为摄像机的主平面
图像坐标系:如图(u-v)
世界坐标系:如图(o-x-y-z)
摄像机坐标系:如图 世界坐标系(Ow-x-y-z)
f为焦距
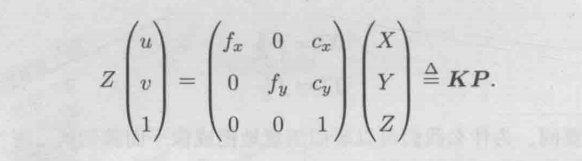
2.相机模型
坐标系量的标记:
1 世界坐标系:Pw(Xw,Yw,Zw)
2
2 摄像机坐标系:P(X,Y,Z)
3
.
图像坐标系 Puv(u,v)
:
世界坐标系:
分为过程:
1.摄像机坐标系的透视变换 到图像坐标系的变化
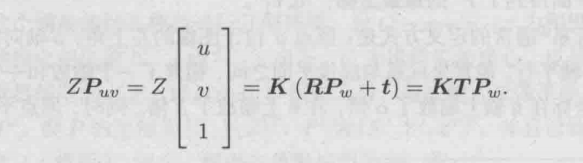
2.摄像机坐标系到世界坐标系的变化
总的变换:
3. 畸变模型
图像畸变是由于透镜制造精度以及组装工艺的偏差会引入畸变,导致原始图像失真。镜头的畸变分为径向畸变和切向畸变两类。
主要分为径向和切向畸变径向畸变是由于镜头自身凸透镜的固有特性造成的,产生原因是光线在远离透镜中心的地方比靠近中心的地方更加弯曲。
畸变沿着透镜半径方向分布,主要包括桶形畸变和枕形畸变两种,如下图所示:

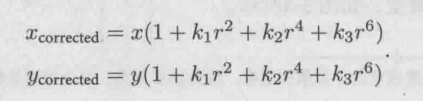
畸变的数学模型可以用主点(principle point)周围的泰勒级数展开式的前几项进行描述,通常使用前两项,即k1和k2,对于畸变很大的镜头,可以增加使用第三项k3来进行描述:
![]()
切向畸变是由于透镜本身与相机传感器平面(成像平面)或图像平面不平行而产生的,这种情况多是由于透镜被粘贴到镜头模组上的安装偏差导致。

畸变模型可以用两个参数p1和p2来描述:

加畸变采用上面的公式即可
去畸变推荐opencv函数
https://blog.csdn.net/KYJL888/article/details/81043133
所以摄像机矩阵:
内参为11个:fx,fy,cx,cy,k1,k2,k3,p1p2
外参为6个: R(3),t(3)
4.摄像机矩阵P
 参考:
参考:
1.视觉SLAM 14讲
2.MVG(计算机多视几何)第二版
X
w
Y
w
Z
w
, ,
X
c
Y
c
Z
c
, ,
[
u
,
v
]
[
x
,
y
]















 5892
5892











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









