









 本文详细介绍了如何在信捷XDHEthercat软件3.7.16版本中设置直线运动的正负极限,以防止超出范围报警并导致电机停止。设置包括信号输入点X3和X4以及极性选项,确保在触及极限时能正确响应。对于低版本软件,应注意设置信号点的编号。
本文详细介绍了如何在信捷XDHEthercat软件3.7.16版本中设置直线运动的正负极限,以防止超出范围报警并导致电机停止。设置包括信号输入点X3和X4以及极性选项,确保在触及极限时能正确响应。对于低版本软件,应注意设置信号点的编号。
本文介绍信捷 XDH Ethercat 正负极限的设置,软件版本3.7.16。
一般来说,直线运动,需要设置正负硬极限,当移动块在正负极限范围内,不报警,超过会报警。
产生超过极限报警时电机会停,需要复位才能继续运动。
正负硬极限的开关安装位置确定了合理的移动范围。
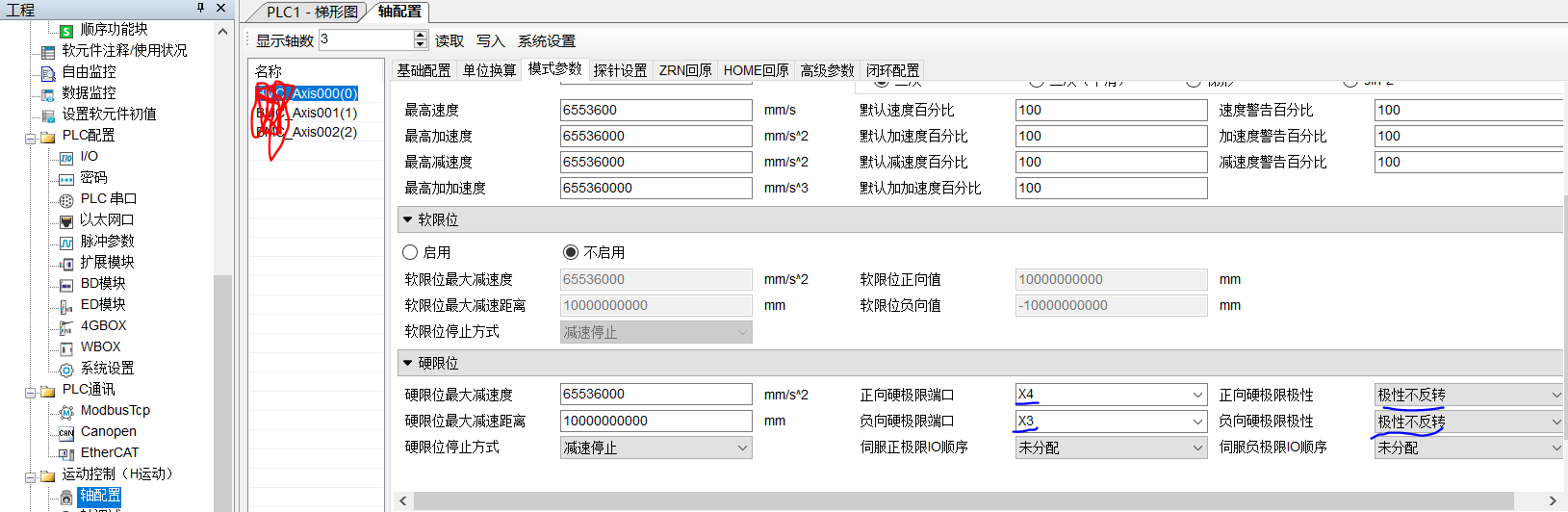
如上图所示,设置了负向和正向极限的信号输入点,X3,X4,请读者根据实际情况确定。
另外还设置了极性,如果移动到极限位置,此信号ON,那么和上面一样,设置成极限不反转。
如果移动到极限位置,此信号OFF,那么设置成极限反转。
值得一提的是对于低版本软件,是设置X点的号码,比如3,4,这个一定要注意。

















 2813
2813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









