









OpenPlanner规划全局路径,如果要支持实时根据环境更新路径(变道、改变路径)需要在op_global_planner中勾选Lane Changing和Replanning两个功能
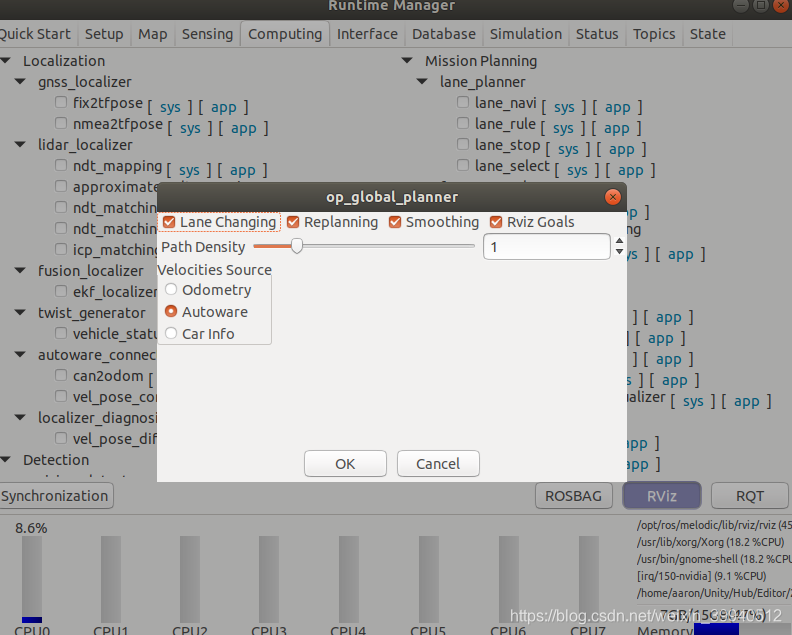
此外还要在op_global_planner.launch文件中使能enableDynamicMapUpdate,整个变道的流程如下图所示:

首先讲一下wayarea2grid这个节点,主要作用是读取vector_map中的WAY_AREA信息,这里遇到了第一个问题:绘制的vector_map没有WAY_AREA信息,甚至Autoware自带的地图也不包含WAY_AREA信息,经过查找发现原本使用的插件版本是MapToolbox-0.1.1-preview.6不包含WAY_AREA,而新版本MapToolbox-0.1.1-preview.9是包含WAY_AREA的,于是重新绘制,问题解决。
然后是road_occupancy_processor这个节点,它结合点云信息和grid_map_wayarea生成gridmap_road_status:一个包含障碍物信息的占位栅格图;op_global_planner会根据占位栅格图的信息更新vector_map的权重然后重新规划路径。
要想知道op_global_planner是如何规划路径并变道的,就必须先了解它是如何组织构建地图信息的。
基本道路元素:
- Road
Node、Lane (车道、节点)
Way area(可行驶区域)
Dtlane:(目前不支持) - Road Shape
Curb
Roadedge(路边缘)
Gutter(侧水沟)
Intersection(路口) - Road Surface(路面)
Whiteline(白线)
Stopline(停车线)
Zebrazone(斑马线)
Crosswalk(人行横道)
RoadSurfaceMark(路面标识) - Roadside
Guardrail(护栏)
Sidewalk(人行道) - Structure
Pole(杆)
Utilitypole(电线杆)
Roadsign(标识)
Signaldata(信号灯)
Streetlight(路灯)
Curvemirror
Wall
Fence(围栏)
RailroadCrossing(铁路道口)
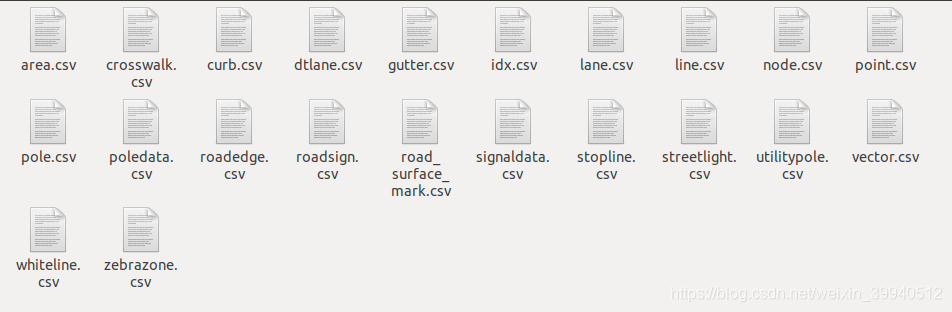
上图是Autoware自带的矢量地图在Rviz上的显示和保存地图的文件,可以看出不同的文件对应不同的基本道路元素,但从存储的文件到在Rviz上进行可视化,中间经历了怎样的过程对我们理解路径规划是至关重要的。
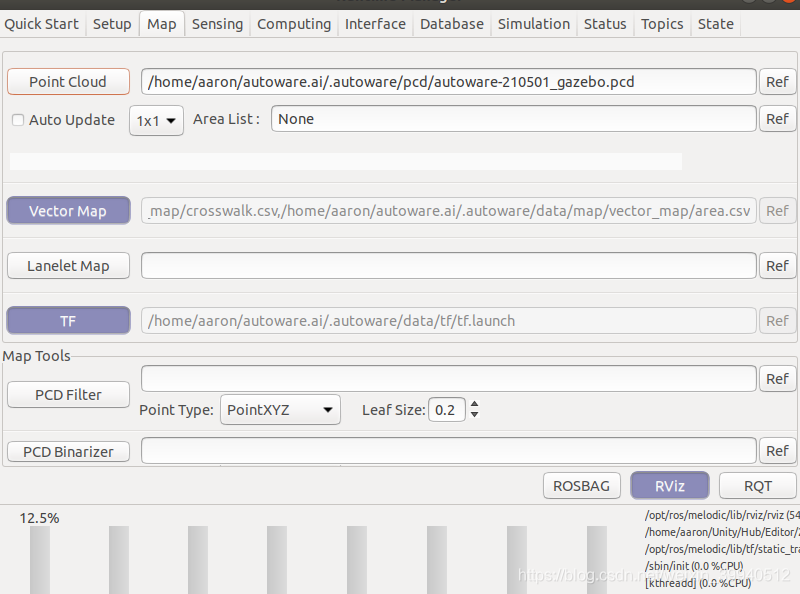
读取和发布
在Runtime Manager中选择好文件路径并点击Vector Map,就完成了矢量地图的读取:
通过查看autoware.ai/src/autoware/utilities/runtime_manager/scripts/map.yaml可以知道点击Vector Map时运行了map_file包里的vector_map_loader节点:
它读取矢量地图信息并按照一定的组织方式发布出去,这样不同的节点只需要按需订阅即可,不用反复读取,此时的Vector Map并不能用于路径规划,还需要进一步组织。
RoadNetwork构建
op_global_planner首先订阅了所需的vector_map_info:
//Mapping Section
sub_lanes = nh.subscribe("/vector_map_info/lane", 1, &GlobalPlanner::callbackGetVMLanes, this);
sub_points = nh.subscribe("/vector_map_info/point", 1, &GlobalPlanner::callbackGetVMPoints, this);
sub_dt_lanes = nh.subscribe("/vector_map_info/dtlane", 1, &GlobalPlanner::callbackGetVMdtLanes, this);
sub_intersect = nh.subscribe("/vector_map_info/cross_road", 1, &GlobalPlanner::callbackGetVMIntersections, this);
sup_area = nh.subscribe("/vector_map_info/area", 1, &GlobalPlanner::callbackGetVMAreas, this);
sub_lines = nh.subscribe("/vector_map_info/line", 1, &GlobalPlanner::callbackGetVMLines, this);
sub_stop_line = nh.subscribe("/vector_map_info/stop_line", 1, &GlobalPlanner::callbackGetVMStopLines, this);
sub_signals = nh.subscribe("/vector_map_info/signal", 1, &GlobalPlanner::callbackGetVMSignal, this);
sub_vectors = nh.subscribe("/vector_map_info/vector", 1, &GlobalPlanner::callbackGetVMVectors, this);
sub_curbs = nh.subscribe("/vector_map_info/curb", 1, &GlobalPlanner::callbackGetVMCurbs, this);
sub_edges = nh.subscribe("/vector_map_info/road_edge", 1, &GlobalPlanner::callbackGetVMRoadEdges, this);
sub_way_areas = nh.subscribe("/vector_map_info/way_area", 1, &GlobalPlanner::callbackGetVMWayAreas, this);
sub_cross_walk = nh.subscribe("/vector_map_info/cross_walk", 1, &GlobalPlanner::callbackGetVMCrossWalks, this);
sub_nodes = nh.subscribe("/vector_map_info/node", 1, &GlobalPlanner::callbackGetVMNodes, this);
然后在回调函数中将对应的数据保存到m_MapRaw中:
//Mapping Section
void GlobalPlanner::callbackGetVMLanes(const vector_map_msgs::LaneArray& msg)
{
std::cout << "Received Lanes" << msg.data.size() << endl;
if(m_MapRaw.pLanes == nullptr)
m_MapRaw.pLanes = new UtilityHNS::AisanLanesFileReader(msg);
}
void GlobalPlanner::callbackGetVMPoints(const vector_map_msgs::PointArray& msg)
{
std::cout << "Received Points" << msg.data.size() << endl;
if(m_MapRaw.pPoints == nullptr)
m_MapRaw.pPoints = new UtilityHNS::AisanPointsFileReader(msg);
}
void GlobalPlanner::callbackGetVMdtLanes(const vector_map_msgs::DTLaneArray& msg)
{
std::cout << "Received dtLanes" << msg.data.size() << endl;
if(m_MapRaw.pCenterLines == nullptr)
m_MapRaw.pCenterLines = new UtilityHNS::AisanCenterLinesFileReader(msg);
}
void GlobalPlanner::callbackGetVMIntersections(const vector_map_msgs::CrossRoadArray& msg)
{
std::cout << "Received CrossRoads" << msg.data.size() << endl;
if(m_MapRaw.pIntersections == nullptr)
m_MapRaw.pIntersections = new UtilityHNS::AisanIntersectionFileReader(msg);
}
void GlobalPlanner::callbackGetVMAreas(const vector_map_msgs::AreaArray& msg)
{
std::cout << "Received Areas" << msg.data.size() << endl;
if(m_MapRaw.pAreas == nullptr)
m_MapRaw.pAreas = new UtilityHNS::AisanAreasFileReader(msg);
}
void GlobalPlanner::callbackGetVMLines(const vector_map_msgs::LineArray& msg)
{
std::cout << "Received Lines" << msg.data.size() << endl;
if(m_MapRaw.pLines == nullptr)
m_MapRaw.pLines = new UtilityHNS::AisanLinesFileReader(msg);
}
void GlobalPlanner::callbackGetVMStopLines(const vector_map_msgs::StopLineArray& msg)
{
std::cout << "Received StopLines" << msg.data.size() << endl;
if(m_MapRaw.pStopLines == nullptr)
m_MapRaw.pStopLines = new UtilityHNS::AisanStopLineFileReader(msg);
}
void GlobalPlanner::callbackGetVMSignal(const vector_map_msgs::SignalArray& msg)
{
std::cout << "Received Signals" << msg.data.size() << endl;
if(m_MapRaw.pSignals == nullptr)
m_MapRaw.pSignals = new UtilityHNS::AisanSignalFileReader(msg);
}
void GlobalPlanner::callbackGetVMVectors(const vector_map_msgs::VectorArray& msg)
{
std::cout << "Received Vectors" << msg.data.size() << endl;
if(m_MapRaw.pVectors == nullptr)
m_MapRaw.pVectors = new UtilityHNS::AisanVectorFileReader(msg);
}
void GlobalPlanner::callbackGetVMCurbs(const vector_map_msgs::CurbArray& msg)
{
std::cout << "Received Curbs" << msg.data.size() << endl;
if(m_MapRaw.pCurbs == nullptr)
m_MapRaw.pCurbs = new UtilityHNS::AisanCurbFileReader(msg);
}
void GlobalPlanner::callbackGetVMRoadEdges(const vector_map_msgs::RoadEdgeArray& msg)
{
std::cout << "Received Edges" << msg.data.size() << endl;
if(m_MapRaw.pRoadedges == nullptr)
m_MapRaw.pRoadedges = new UtilityHNS::AisanRoadEdgeFileReader(msg);
}
void GlobalPlanner::callbackGetVMWayAreas(const vector_map_msgs::WayAreaArray& msg)
{
std::cout << "Received Wayareas" << msg.data.size() << endl;
if(m_MapRaw.pWayAreas == nullptr)
m_MapRaw.pWayAreas = new UtilityHNS::AisanWayareaFileReader(msg);
}
void GlobalPlanner::callbackGetVMCrossWalks(const vector_map_msgs::CrossWalkArray& msg)
{
std::cout << "Received CrossWalks" << msg.data.size() << endl;
if(m_MapRaw.pCrossWalks == nullptr)
m_MapRaw.pCrossWalks = new UtilityHNS::AisanCrossWalkFileReader(msg);
}
void GlobalPlanner::callbackGetVMNodes(const vector_map_msgs::NodeArray& msg)
{
std::cout << "Received Nodes" << msg.data.size() << endl;
if(m_MapRaw.pNodes == nullptr)
m_MapRaw.pNodes = new UtilityHNS::AisanNodesFileReader(msg);
}
回到op_global_planner,的MainLoop()函数中:
void GlobalPlanner::MainLoop()
{
ros::Rate loop_rate(25);//循环频率
timespec animation_timer;//计时器
UtilityHNS::UtilityH::GetTickCount(animation_timer);
while (ros::ok())
{
ros::spinOnce();
bool bMakeNewPlan = false;
//地图种类选择,这里默认地图类型为PlannerHNS::MAP_AUTOWARE
if(m_params.mapSource == PlannerHNS::MAP_KML_FILE && !m_bKmlMap)
{
m_bKmlMap = true;
PlannerHNS::MappingHelpers::LoadKML(m_params.KmlMapPath, m_Map);
visualization_msgs::MarkerArray map_marker_array;
PlannerHNS::ROSHelpers::ConvertFromRoadNetworkToAutowareVisualizeMapFormat(m_Map, map_marker_array);
pub_MapRviz.publish(map_marker_array);
}
else if (m_params.mapSource == PlannerHNS::MAP_FOLDER && !m_bKmlMap)
{
m_bKmlMap = true;
PlannerHNS::MappingHelpers::ConstructRoadNetworkFromDataFiles(m_params.KmlMapPath, m_Map, true);
visualization_msgs::MarkerArray map_marker_array;
PlannerHNS::ROSHelpers::ConvertFromRoadNetworkToAutowareVisualizeMapFormat(m_Map, map_marker_array);
pub_MapRviz.publish(map_marker_array);
}
else if (m_params.mapSource == PlannerHNS::MAP_AUTOWARE && !m_bKmlMap)
{
std::vector<UtilityHNS::AisanDataConnFileReader::DataConn> conn_data;;
//根据地图是否有节点(Node):有节点:m_MapRaw.GetVersion()==2,无节点:m_MapRaw.GetVersion()==1
if(m_MapRaw.GetVersion()==2)
{
std::cout << "Map Version 2" << endl;
m_bKmlMap = true;
PlannerHNS::MappingHelpers::ConstructRoadNetworkFromROSMessageV2(m_MapRaw.pLanes->m_data_list, m_MapRaw.pPoints->m_data_list,
m_MapRaw.pCenterLines->m_data_list, m_MapRaw.pIntersections->m_data_list,m_MapRaw.pAreas->m_data_list,
m_MapRaw.pLines->m_data_list, m_MapRaw.pStopLines->m_data_list, m_MapRaw.pSignals->m_data_list,
m_MapRaw.pVectors->m_data_list, m_MapRaw.pCurbs->m_data_list, m_MapRaw.pRoadedges->m_data_list, m_MapRaw.pWayAreas->m_data_list,
m_MapRaw.pCrossWalks->m_data_list, m_MapRaw.pNodes->m_data_list, conn_data,
m_MapRaw.pLanes, m_MapRaw.pPoints, m_MapRaw.pNodes, m_MapRaw.pLines, PlannerHNS::GPSPoint(), m_Map, true, m_params.bEnableLaneChange, false);
}
else if(m_MapRaw.GetVersion()==1)
{
std::cout << "Map Version 1" << endl;
m_bKmlMap = true;
//初始化地图
PlannerHNS::MappingHelpers::ConstructRoadNetworkFromROSMessage(m_MapRaw.pLanes->m_data_list, m_MapRaw.pPoints->m_data_list,
m_MapRaw.pCenterLines->m_data_list, m_MapRaw.pIntersections->m_data_list,m_MapRaw.pAreas->m_data_list,
m_MapRaw.pLines->m_data_list, m_MapRaw.pStopLines->m_data_list, m_MapRaw.pSignals->m_data_list,
m_MapRaw.pVectors->m_data_list, m_MapRaw.pCurbs->m_data_list, m_MapRaw.pRoadedges->m_data_list, m_MapRaw.pWayAreas->m_data_list,
m_MapRaw.pCrossWalks->m_data_list, m_MapRaw.pNodes->m_data_list, conn_data, PlannerHNS::GPSPoint(), m_Map, true, m_params.bEnableLaneChange, false);
}
//用于地图可视化
if(m_bKmlMap)
{
visualization_msgs::MarkerArray map_marker_array;
PlannerHNS::ROSHelpers::ConvertFromRoadNetworkToAutowareVisualizeMapFormat(m_Map, map_marker_array);
pub_MapRviz.publish(map_marker_array);
}
}
ClearOldCostFromMap();
if(m_GoalsPos.size() > 0)
{
//判断m_GeneratedTotalPaths是否为空
if(m_GeneratedTotalPaths.size() > 0 && m_GeneratedTotalPaths.at(0).size() > 3)
{
if(m_params.bEnableReplanning)
{
PlannerHNS::RelativeInfo info;
bool ret = PlannerHNS::PlanningHelpers::GetRelativeInfoRange(m_GeneratedTotalPaths, m_CurrentPose, 0.75, info);
if(ret == true && info.iGlobalPath >= 0 && info.iGlobalPath < m_GeneratedTotalPaths.size() && info.iFront > 0 && info.iFront < m_GeneratedTotalPaths.at(info.iGlobalPath).size())
{
//prep\_point到目标点的距离
double remaining_distance = m_GeneratedTotalPaths.at(info.iGlobalPath).at(m_GeneratedTotalPaths.at(info.iGlobalPath).size()-1).cost - (m_GeneratedTotalPaths.at(info.iGlobalPath).at(info.iFront).cost + info.to_front_distance);
if(remaining_distance <= REPLANNING_DISTANCE)
{
bMakeNewPlan = true;
if(m_GoalsPos.size() > 0)
m_iCurrentGoalIndex = (m_iCurrentGoalIndex + 1) % m_GoalsPos.size();
std::cout << "Current Goal Index = " << m_iCurrentGoalIndex << std::endl << std::endl;
}
}
}
}
else
bMakeNewPlan = true;
//判断是否需要规划新的路径
if(bMakeNewPlan || (m_params.bEnableDynamicMapUpdate && UtilityHNS::UtilityH::GetTimeDiffNow(m_ReplnningTimer) > REPLANNING_TIME))
{
UtilityHNS::UtilityH::GetTickCount(m_ReplnningTimer);
PlannerHNS::WayPoint goalPoint = m_GoalsPos.at(m_iCurrentGoalIndex);
bool bNewPlan = GenerateGlobalPlan(m_CurrentPose, goalPoint, m_GeneratedTotalPaths);
if(bNewPlan)
{
bMakeNewPlan = false;
VisualizeAndSend(m_GeneratedTotalPaths);
}
}
VisualizeDestinations(m_GoalsPos, m_iCurrentGoalIndex);
}
loop_rate.sleep();
}
}
这里调用ConstructRoadNetworkFromROSMessageV2构建RoadNetwork,其中有一个关键参数m_params.bEnableLaneChange,也就是之前我们在Runtime Manager中勾选的Lane Changing。
void MappingHelpers::ConstructRoadNetworkFromROSMessageV2(const std::vector<UtilityHNS::AisanLanesFileReader::AisanLane>& lanes_data,
const std::vector<UtilityHNS::AisanPointsFileReader::AisanPoints>& points_data,
const std::vector<UtilityHNS::AisanCenterLinesFileReader::AisanCenterLine>& dt_data,
const std::vector<UtilityHNS::AisanIntersectionFileReader::AisanIntersection>& intersection_data,
const std::vector<UtilityHNS::AisanAreasFileReader::AisanArea>& area_data,
const std::vector<UtilityHNS::AisanLinesFileReader::AisanLine>& line_data,
const std::vector<UtilityHNS::AisanStopLineFileReader::AisanStopLine>& stop_line_data,
const std::vector<UtilityHNS::AisanSignalFileReader::AisanSignal>& signal_data,
const std::vector<UtilityHNS::AisanVectorFileReader::AisanVector>& vector_data,
const std::vector<UtilityHNS::AisanCurbFileReader::AisanCurb>& curb_data,
const std::vector<UtilityHNS::AisanRoadEdgeFileReader::AisanRoadEdge>& roadedge_data,
const std::vector<UtilityHNS::AisanWayareaFileReader::AisanWayarea>& wayarea_data,
const std::vector<UtilityHNS::AisanCrossWalkFileReader::AisanCrossWalk>& crosswalk_data,
const std::vector<UtilityHNS::AisanNodesFileReader::AisanNode>& nodes_data,
const std::vector<UtilityHNS::AisanDataConnFileReader::DataConn>& conn_data,
UtilityHNS::AisanLanesFileReader* pLaneData,
UtilityHNS::AisanPointsFileReader* pPointsData,
UtilityHNS::AisanNodesFileReader* pNodesData,
UtilityHNS::AisanLinesFileReader* pLinedata,
const GPSPoint& origin, RoadNetwork& map, const bool& bSpecialFlag,
const bool& bFindLaneChangeLanes, const bool& bFindCurbsAndWayArea)
{
vector<Lane> roadLanes;
for(unsigned int i=0; i< pLaneData->m_data_list.size(); i++)
{
if(pLaneData->m_data_list.at(i).LnID > g_max_lane_id)
g_max_lane_id = pLaneData->m_data_list.at(i).LnID;
}
cout << " >> Extracting Lanes ... " << endl;
CreateLanes(pLaneData, pPointsData, pNodesData, roadLanes);
cout << " >> Fix Waypoints errors ... " << endl;
FixTwoPointsLanes(roadLanes);
FixRedundantPointsLanes(roadLanes);
ConnectLanes(pLaneData, roadLanes);
cout << " >> Create Missing lane connections ... " << endl;
FixUnconnectedLanes(roadLanes);
FixTwoPointsLanes(roadLanes);
//map has one road segment
RoadSegment roadSegment1;
roadSegment1.id = 1;
roadSegment1.Lanes = roadLanes;
map.roadSegments.push_back(roadSegment1);
//Fix angle for lanes
for(unsigned int rs = 0; rs < map.roadSegments.size(); rs++)
{
for(unsigned int i =0; i < map.roadSegments.at(rs).Lanes.size(); i++)
{
Lane* pL = &map.roadSegments.at(rs).Lanes.at(i);
PlannerHNS::PlanningHelpers::FixAngleOnly(pL->points);
}
}
//Link Lanes and lane's waypoints by pointers
cout << " >> Link lanes and waypoints with pointers ... " << endl;
LinkLanesPointers(map);
for(unsigned int rs = 0; rs < map.roadSegments.size(); rs++)
{
for(unsigned int i =0; i < map.roadSegments.at(rs).Lanes.size(); i++)
{
Lane* pL = &map.roadSegments.at(rs).Lanes.at(i);
for(unsigned int j = 0 ; j < pL->points.size(); j++)
{
if(pL->points.at(j).actionCost.size() > 0)
{
if(pL->points.at(j).actionCost.at(0).first == LEFT_TURN_ACTION)
{
AssignActionCostToLane(pL, LEFT_TURN_ACTION, LEFT_INITIAL_TURNS_COST);
break;
}
else if(pL->points.at(j).actionCost.at(0).first == RIGHT_TURN_ACTION)
{
AssignActionCostToLane(pL, RIGHT_TURN_ACTION, RIGHT_INITIAL_TURNS_COST);
break;
}
}
}
}
}
if(bFindLaneChangeLanes)
{
cout << " >> Extract Lane Change Information... " << endl;
FindAdjacentLanesV2(map);
}
//Extract Signals and StopLines
cout << " >> Extract Signal data ... " << endl;
ExtractSignalDataV2(signal_data, vector_data, pPointsData, origin, map);
//Stop Lines
cout << " >> Extract Stop lines data ... " << endl;
ExtractStopLinesDataV2(stop_line_data, pLinedata, pPointsData, origin, map);
if(bFindCurbsAndWayArea)
{
//Curbs
cout << " >> Extract curbs data ... " << endl;
ExtractCurbDataV2(curb_data, pLinedata, pPointsData, origin, map);
//Wayarea
cout << " >> Extract wayarea data ... " << endl;
ExtractWayArea(area_data, wayarea_data, line_data, points_data, origin, map);
}
//Link waypoints
cout << " >> Link missing branches and waypoints... " << endl;
LinkMissingBranchingWayPointsV2(map);
//Link StopLines and Traffic Lights
cout << " >> Link StopLines and Traffic Lights ... " << endl;
LinkTrafficLightsAndStopLinesV2(map);
// //LinkTrafficLightsAndStopLinesConData(conn_data, id_replace_list, map);
cout << " >> Map loaded from data with " << roadLanes.size() << " lanes" << endl;
}
此处我们重点关注的是跟变道有关的代码,即函数:FindAdjacentLanesV2
void MappingHelpers::FindAdjacentLanesV2(RoadNetwork& map)
{
bool bTestDebug = false;
for(unsigned int rs = 0; rs < map.roadSegments.size(); rs++)
{
for(unsigned int i =0; i < map.roadSegments.at(rs).Lanes.size(); i++)
{
Lane* pL = &map.roadSegments.at(rs).Lanes.at(i);
for(unsigned int i2 =0; i2 < map.roadSegments.at(rs).Lanes.size(); i2++)
{
Lane* pL2 = &map.roadSegments.at(rs).Lanes.at(i2);
if(pL->id == pL2->id) continue;
if(pL->id == 1683)
bTestDebug = true;
for(unsigned int p=0; p < pL->points.size(); p++)
{
WayPoint* pWP = &pL->points.at(p);
RelativeInfo info;
PlanningHelpers::GetRelativeInfoLimited(pL2->points, *pWP, info);
cout << "info.bAfter: " << info.bAfter << " info.bBefore:" << info.bBefore << " info.perp_distance:" << fabs(info.perp_distance) << " angle:" << UtilityH::AngleBetweenTwoAnglesPositive(info.perp_point.pos.a, pWP->pos.a) << endl;
if(!info.bAfter && !info.bBefore && fabs(info.perp_distance) > 0.5 && fabs(info.perp_distance) < 5 && UtilityH::AngleBetweenTwoAnglesPositive(info.perp_point.pos.a, pWP->pos.a) < 0.06)
{
WayPoint* pWP2 = &pL2->points.at(info.iFront);
if(info.perp_distance < 0)
{
if(pWP->pRight == 0)
{
pWP->pRight = pWP2;
pWP->RightPointId = pWP2->id;
pWP->RightLnId = pL2->id;
pL->pRightLane = pL2;
}
if(pWP2->pLeft == 0)
{
pWP2->pLeft = pWP;
pWP2->LeftPointId = pWP->id;
pWP2->LeftLnId = pL->id;
pL2->pLeftLane = pL;
}
}
else
{
if(pWP->pLeft == 0)
{
pWP->pLeft = pWP2;
pWP->LeftPointId = pWP2->id;
pWP->LeftLnId = pL2->id;
pL->pLeftLane = pL2;
}
if(pWP2->pRight == 0)
{
pWP2->pRight = pWP;
pWP2->RightPointId = pWP->id;
pWP2->RightLnId = pL->id;
pL2->pRightLane = pL;
}
}
}
}
}
}
}
}
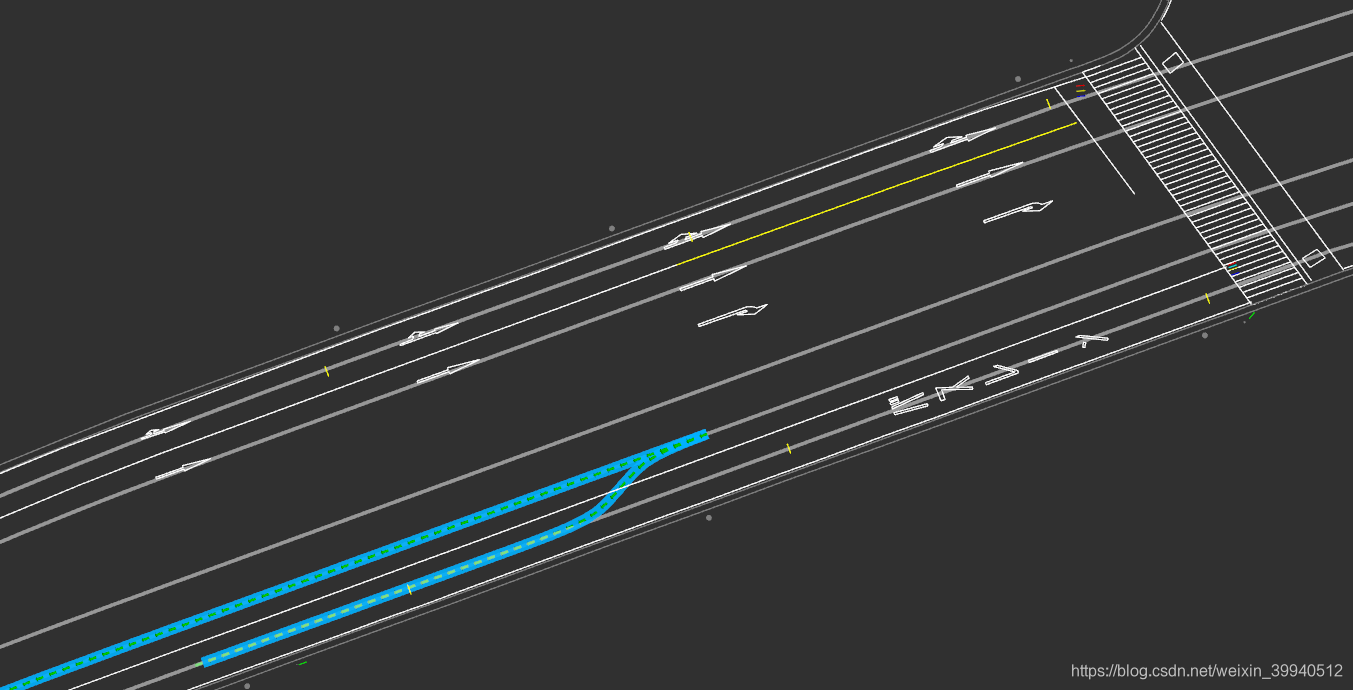
这段代码是理解变道过程的关键,我们知道Lane由一系列的Node组成,不同的Lane汇聚分叉组成道路网即RoadNetwork,但对于同向的并行车道现有的拓扑连通图并不足以完成变道的任务,如下图所示:

这就是FindAdjacentLanesV2要解决的问题:构建不同车道临近节点的连接。

具体到一个节点相对一条道路时有两种情况如下图所示:

GetRelativeInfoLimited函数计算节点pWP和道路pl2的相对位置关系,这里的计算都是以pWP为圆心进行计算的,perp_distance为道路上与pWP距离最近的两个节点所在直线在y轴上的截距,perp_distance为正表示pWP在道路的右边,为负表示pWP在道路的左边。
这里有一个bug困扰了我好久,倒数第四行原始代码中是这样的:pWP2->pRight = pWP->pLeft;,这导致有些地方可以从右向左变道但是不能从左向右变道,更改过后立刻就可以了。

















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









