










G2O
一、概念
G2O(General Graph Optimization)是通用图优化计算库,能将优化问题表达成图,就可以使用G2O进行求解,如常见的Bundle Adjustment,ICP,数据拟合等。
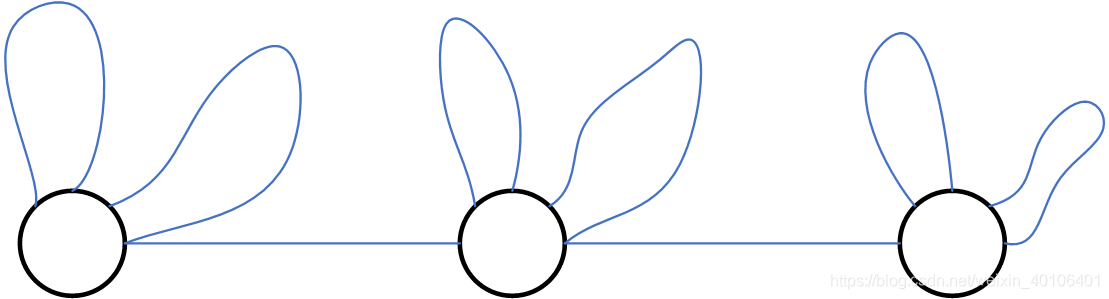
图优化模型中,将待优化的变量作为顶点,条件信息作为边。如上图中,可以解释为三个顶点为不同时刻待优化估计的传感器的位姿,各个边表示传感器位姿量测信息,最终需要估计各个顶点的最优结果。
二、安装使用
G2O库的github仓库:RainerKuemmerle/g2o
#g2o安装
#去github下载工程,并使用cmake编译安装
git clone https://github.com/RainerKuemmerle/g2o.git
mkdir build
cd build
cmake ..
make
sudo make install
# g2o的使用,以下CMakeLists.txt文件中要添加的内容
# g2o库为非标准库,需要向CMAKE_MODULE_PATH中添加FindG2O.cmake才能后序使用find_package找到相关文件
LIST( APPEND CMAKE_MODULE_PATH /home/zhangph/data/Tools/g2o/cmake_modules/ )
find_package(G2O REQUIRED)
include_directories(${G2O_INCLUDE_DIRS})
target_link_libraries( demo_g2o
${OpenCV_LIBS}
${G2O_CORE_LIBRARY}
${G2O_STUFF_LIBRARY}
)
三、使用例程
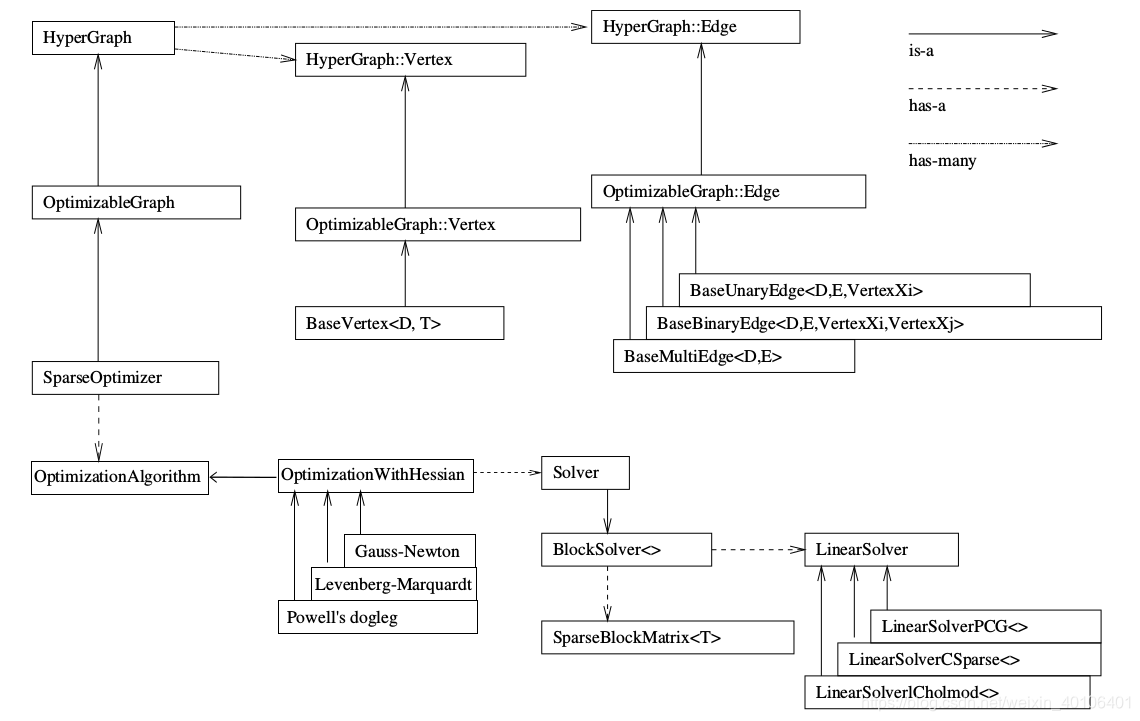
以上为g2o库的核心类的关系图,对照上图在使用过程中,主要分为以下几步:
- 构建求解器
- 构建优化器
- 添加顶点和边
- 启动优化
cmake_minimum_required(VERSION 3.0.0)
project(demo_g2o VERSION 0.1.0)
#设置输出core_dump
add_definitions(" -g")
set(CMAKE_BUILD_TYPE Release)
set(CMAKE_CXX_FLAGS "-std=c++14 -O3")
# OpenCV
find_package(OpenCV REQUIRED)
include_directories(${OpenCV_INCLUDE_DIRS})
# g2o
LIST( APPEND CMAKE_MODULE_PATH /home/zhangph/data/Tools/g2o/cmake_modules/ )
find_package(G2O REQUIRED)
include_directories(${G2O_INCLUDE_DIRS})
# Eigen
include_directories("/usr/include/eigen3")
#g2oCurveFitting.cpp
add_executable(demo_g2o main.cpp)
target_link_libraries( demo_g2o
${OpenCV_LIBS}
${G2O_CORE_LIBRARY}
${G2O_STUFF_LIBRARY}
)
#include <iostream>
#include <g2o/core/g2o_core_api.h>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/core/optimization_algorithm_dogleg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <Eigen/Core>
#include <opencv2/core/core.hpp>
using namespace std;
// 曲线模型的顶点,模板参数:优化变量维度和数据类型
class CurveFittingVertex : public g2o::BaseVertex<3, Eigen::Vector3d> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
// 重置
virtual void setToOriginImpl() override {
_estimate << 0, 0, 0;
}
// 更新
virtual void oplusImpl(const double *update) override {
_estimate += Eigen::Vector3d(update);
}
// 存盘和读盘:留空
virtual bool read(istream &in) {}
virtual bool write(ostream &out) const {}
};
// 误差模型 模板参数:观测值维度,类型,连接顶点类型
class CurveFittingEdge : public g2o::BaseUnaryEdge<1, double, CurveFittingVertex> {
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
CurveFittingEdge(double x) : BaseUnaryEdge(), _x(x) {}
// 计算曲线模型误差
virtual void computeError() override {
const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]);
const Eigen::Vector3d abc = v->estimate();
_error(0, 0) = _measurement - std::exp(abc(0, 0) * _x * _x + abc(1, 0) * _x + abc(2, 0));
}
// 计算雅可比矩阵
virtual void linearizeOplus() override {
const CurveFittingVertex *v = static_cast<const CurveFittingVertex *> (_vertices[0]);
const Eigen::Vector3d abc = v->estimate();
double y = exp(abc[0] * _x * _x + abc[1] * _x + abc[2]);
_jacobianOplusXi[0] = -_x * _x * y;
_jacobianOplusXi[1] = -_x * y;
_jacobianOplusXi[2] = -y;
}
virtual bool read(istream &in) {}
virtual bool write(ostream &out) const {}
public:
double _x; // x 值, y 值为 _measurement
};
//生成随机观测
void getRndData(double para[], int N, double w_sigma, vector<double>&x_data, vector<double>&y_data){
double ar = para[0];
double br = para[1];
double cr = para[2];
cv::RNG rng;//opencv中的随机数生成器
for (size_t i = 0; i < N; i++)
{
double x = i/100.0;
x_data.push_back(x);
y_data.push_back(exp(ar * x * x + br * x + cr) + rng.gaussian(w_sigma*w_sigma));
}
}
int main(int argc, char** agrv) {
cout << "G2O Test Demo!"<<endl;
//0.生成随机数据 y = exp(ax^2 + bx +c )采样点会受到噪声影响
double para[3] = {1.0, 2.0, 1.0};
int N = 100;
double w_sigma = 1.0;
vector<double>x_data, y_data;
getRndData(para, N, w_sigma, x_data, y_data);
// cout<<x_data.at(1)<<y_data.at(1)<<endl;
// cout<<x_data.at(2)<<y_data.at(2)<<endl;
//-----------------------------使用g2o进行图优化计算------------------------//
typedef g2o::BlockSolver<g2o::BlockSolverTraits<3, 1>> BlockSolverType; // 每个误差项优化变量维度为3,误差值维度为1
typedef g2o::LinearSolverDense<BlockSolverType::PoseMatrixType> LinearSolverType; // 线性求解器类型
//1.创建线性求解器 LinearSolver,
//2.创建BlockSolver,使用上面的线性求解器初始化
//3.创建总求解器solver,并从GN,LN,Dogleg中选择一个,再用上述BlockSolver初始化
auto solver = new g2o::OptimizationAlgorithmLevenberg(g2o::make_unique<BlockSolverType>(g2o::make_unique<LinearSolverType>()));
//4.创建稀疏优化器
g2o::SparseOptimizer opt;//图模型
opt.setAlgorithm(solver);//设置求解器
opt.setVerbose(true);//打开调试输出
//5.定义待优化的图的顶点和边,添加到图模型中
//顶点指待优化对象,这里是三个系数abc,由于它们不时变,因而只需要一个顶点
CurveFittingVertex *v = new CurveFittingVertex();
v->setEstimate(Eigen::Vector3d(2, -1, 5));//(0, 0, 0)为迭代初始值
v->setId(0);
opt.addVertex(v);
//一条边表示对相关顶点的一次观测
for (size_t i = 0; i < N; i++)
{
CurveFittingEdge *edge = new CurveFittingEdge(x_data[i]);
edge->setId(i);
edge->setVertex(0, v); // 设置连接的顶点
edge->setMeasurement(y_data[i]); // 观测数值
edge->setInformation(Eigen::Matrix<double, 1, 1>::Identity() * 1 / (w_sigma * w_sigma)); // 信息矩阵:协方差矩阵之逆
opt.addEdge(edge);
}
//6.执行优化
opt.initializeOptimization();//优化初始化
opt.optimize(10);//设置迭代次数
//7. 输出优化值
Eigen::Vector3d abc_estimate = v->estimate();
cout << "estimated model: " << abc_estimate.transpose() << endl;
}
参考文献:
G2O安装过程中可能报错:
解决libapr-1.so.0:对’uuid_generate@UUID_1.0’未定义的引用_吃龙虾一样能吃饱的博客-CSDN博客














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









