







连续Ziegler_Nichols的频域响应pid整定
Ziegler_Nichols频域响应pid整定的方法是基于稳定性分析的频域响应pid整定方法。该方法整定的思想是:对于给定的被控对象传递函数,可以得到其根轨迹,对应穿越Jw轴的点,增益即为Km,而此点的w值即为wm。
整定公式如下
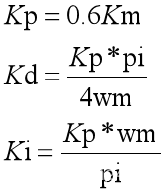
式中,km为系统开始震荡时的增益K值;wm为震荡频率。
仿真实例
设被控对象为
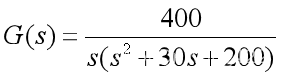
代码如下
%PID Controler Based on Ziegler-Nichols
clear all;
close all;
sys=tf(400,[1,30,200,0]);
figure(1);
rlocus(sys);
[km,pole]=rlocfind(sys)
wm=imag(pole(2));
kp=0.6*km
kd=kp*pi/(4*wm)
ki=kp*wm/pi
figure(2);
grid on;
bode(sys,'r');
sys_pid=tf([kd,kp,ki],[1,0])
sysc=series(sys,sys_pid)
hold on;
bode(sysc,'b')
figure(3);
rlocus(sysc);
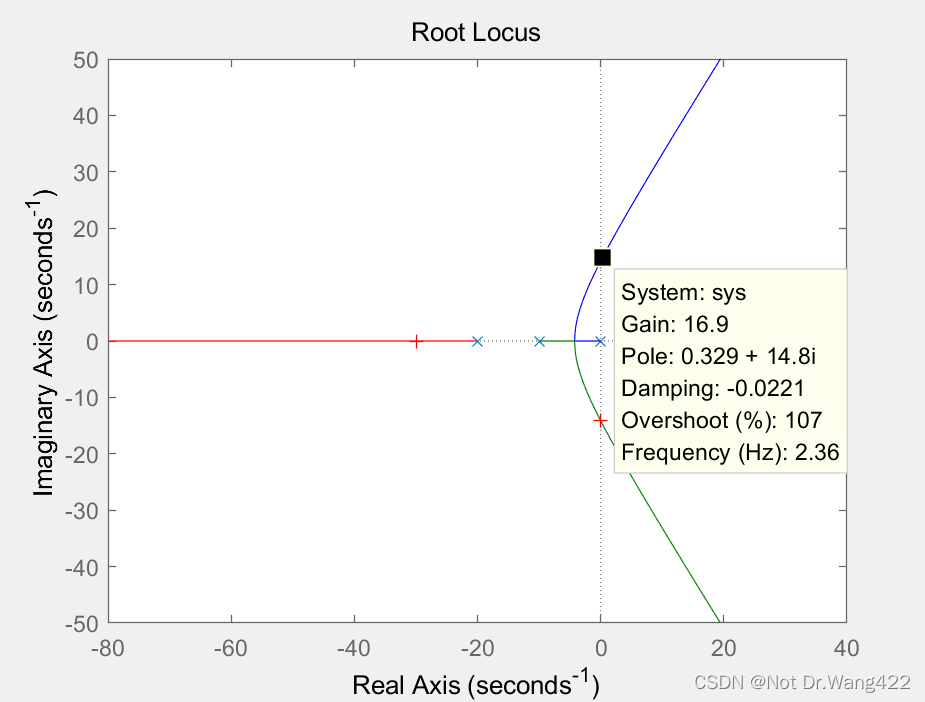
下图为未整定的开环系统根轨迹图
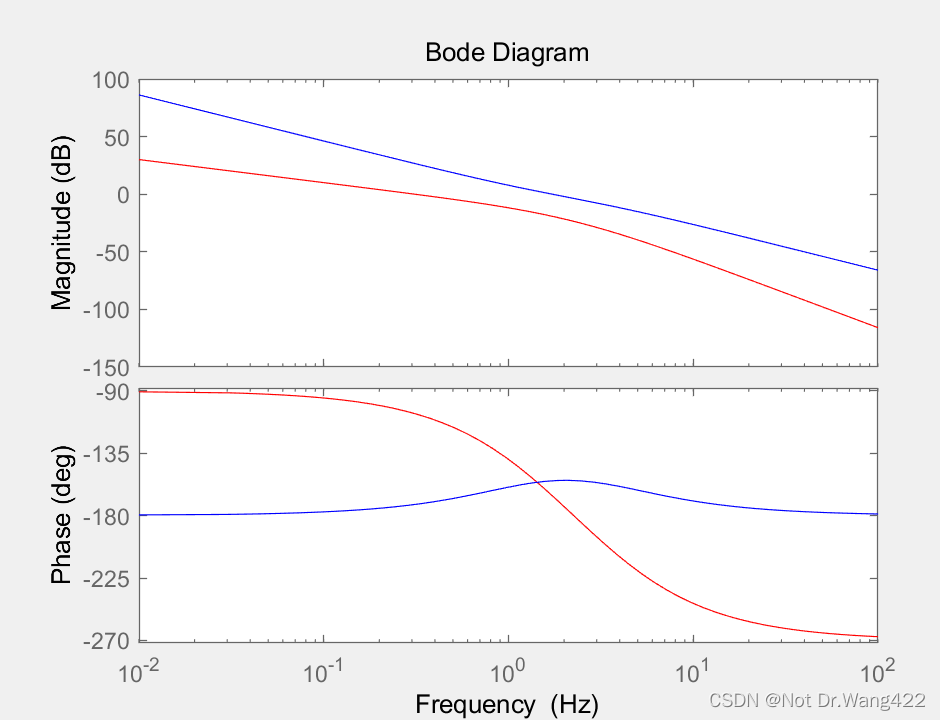
整定前后系统的伯德图(红色为整定前,蓝色为整定后)
下图为整定后闭环系统的根轨迹
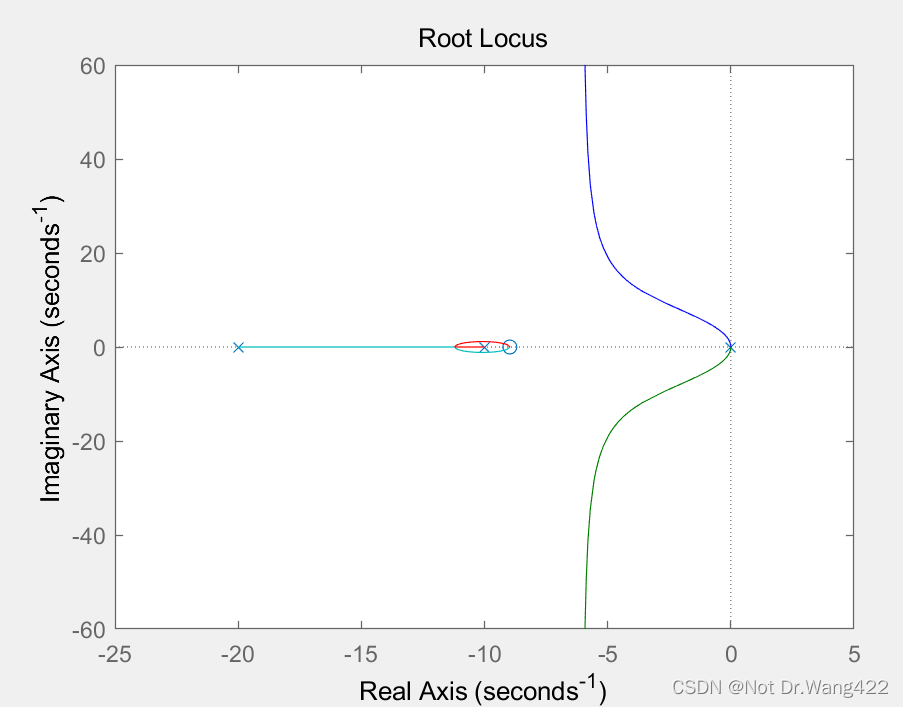
使用rlocus及rlocfind命令可以求得穿越增益km=14.878和穿越频率wm=14rad、s
Ziegler_Nichols整定方法可以求得参数pid
kp = 8.9268
kd =0.49742
ki =40.051
可见,该系统整定后,频带拓宽,相位超前。整定后系统的根轨迹,所有极点位于负变面,达到完全稳定状态。



















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











