







 这篇博客介绍了倍福伺服的PID调节方法,首先确保NC配置正确,然后设置加减速时间,使用示波器观察轴运动曲线,重点关注实际位置、速度和跟随误差。主要调节参数包括速度环Kv、位置环Kp和时间积分Tn,以达到技术参数要求,如误差范围和稳态时间。
这篇博客介绍了倍福伺服的PID调节方法,首先确保NC配置正确,然后设置加减速时间,使用示波器观察轴运动曲线,重点关注实际位置、速度和跟随误差。主要调节参数包括速度环Kv、位置环Kp和时间积分Tn,以达到技术参数要求,如误差范围和稳态时间。
- 操作过程
1.1. NC配置
首先是需要把驱动器、NC轴和PLC的基本操作配置好,使伺服能够正常点动、定位启动等。关于NC操作这边不做阐述

1.2. 加减速设置
伺服PDI调整的基本思路是,先把加减速和加加速度弄得比较大,然后让电机以一个速度来回运动,通过轴的运动曲线动态调整伺服的参数,因此首先是把加减速时间设置,如下:

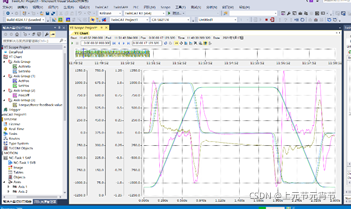
1.3. 示波器添加轴的曲线
通过示波器观察运动过程中的波形图,主要有实际位置、实际速度,指令位置、指令速度和跟随误差等,如下所示:
1.4. 经常调节的PDI参数
速度环Kv,位置环Kp,时间积分Tn,具体参数位置如下

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 3306
3306

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











