







1. 问题描述
import PyKDL
ModuleNotFoundError: No module named 'PyKDL'
这是由于使用的环境中不存在 PyKDL 导致的,实际上 PyKDL 在装 ROS 的时候是一起装上了,但其路径默认在系统的环境中。以我的为例,实际位置位于
/lib/python3/dist-packages
因为我本地的 ubuntu 默认的 python 版本是 Python3.8 ,所以编译的 PyKDL 为 PyKDL.cpython-38-x86_64-linux-gnu.so
但实际需求中,一般不会在默认环境中运行 PyKDL,这个时候是需要重新编译的,以我使用的 conda 环境下的 Python3.9 为例
2. 下载源码
在 /home 即 主目录 下打开终端,随后进入 PyKDL源码地址 然后 git 下来
git clone https://github.com/orocos/orocos_kinematics_dynamics.git
3. 源码编译
完成上述操作后,接下来就可以开始编译了,
先完成 C 语言文件的编译,然后才是 Python 的文件编译
3.1 C文件编译
终端 cd /orocos_kinematics_dynamics/orocos_kdl ,接下来输入如下指令:
mkdir build
cd build
cmake ../
make
sudo make install
3.2 Python文件编译
终端 cd /orocos_kinematics_dynamics/python_orocos_kdl ,接下来输入如下指令:
mkdir build
cd build
cmake ../
make
sudo make install
cmake 那一步亦可以具体指定环境位置,以我的为例 cmake ../ -DPYTHON_EXECUTABLE:FILEPATH=/home/mango/anaconda3/bin/python3.9
但在 cmake 这一步可能会出现如下错误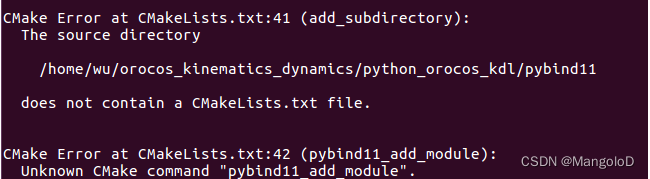
解决方法:
打开终端,输入如下命令
cd /orocos_kinematics_dynamics/python_orocos_kdl
git submodule update --init
这样会重新编译安装 pybind11。
4. 复制 PyKDL.so 文件到指定环境
编译完成后,复制 /orocos_kinematics_dynamics/python_orocos_kdl/build/devel/lib/python3/dist-packages/PyKDL.so 到你的 conda 环境 site-packages 文件夹中,
我这边的路径是 /home/mango/anaconda3/lib/python3.9/site-packages
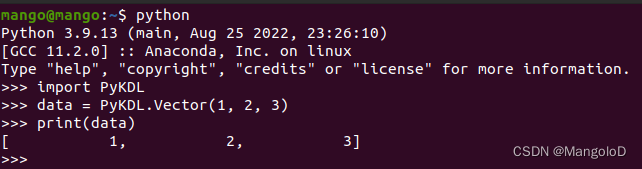
这个时候打开终端的 python,运行以下代码测试一下,如果可以正常运行,那证明成功了
import PyKDL
data = PyKDL.Vector(1, 2, 3)
print(data)
如果 import PyKDL 还是出错,那就
编辑 home 目录下的 .bashrc 文件,即 gedit .bashrc,添加路径
export PYTHONPATH="/home/mango/anaconda3/lib/python3.9/site-packages:$PYTHONPATH"
但这样做可能导致运行其他程序报错,如果报错,这时考虑注释掉这个路径。















 2126
2126











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









