







- 导入头文件
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
- 该段代码用来测试角度
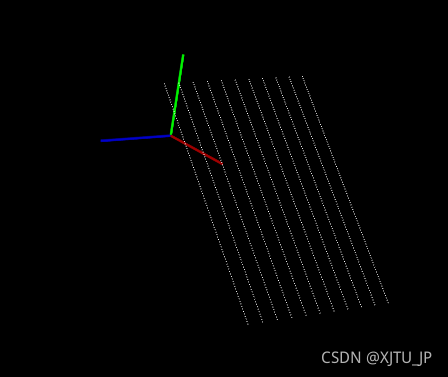
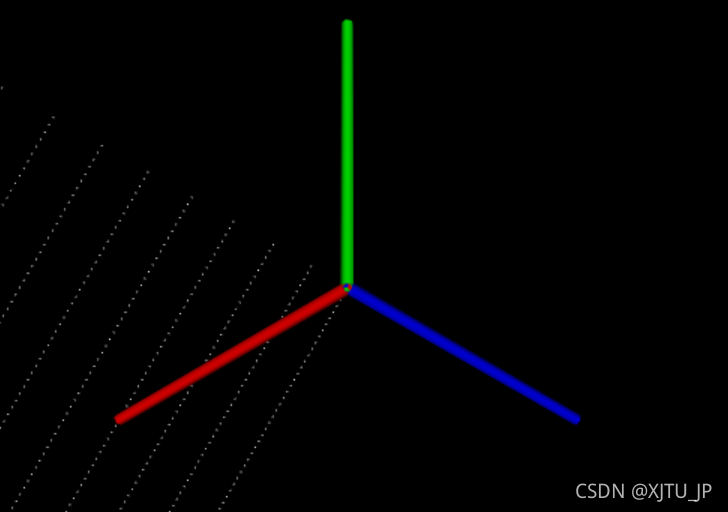
- 红色是X轴,绿色是Y轴,蓝色是Z,也就是说PCL点云库中使用的是右手三维坐标系
//创建点云对象指针和引用
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& cloud = *cloud_ptr;
//创建随机点云
//这个点云的方向是
for (float y = -0.5f; y < 0.5f; y += 0.01f) {
for (float z = -0.5f; z < 0.5f; z += 0.1f) {
pcl::PointXYZ p;
p.x = 1.0f - y;
p.y = y;
p.z = z;
cloud_ptr->points.push_back(p);
}
}
cloud.width = (uint32_t)cloud.size();
cloud.height = 1;
- 关键的代码段是
viewer.setCameraPosition(0, 0, 0, 1, 1, 1, 0, 1, 0); //视点 方向 上方向- 参数:
- 前三个参数 观察点坐标
- 中间三个参数 观察的方向向量
- 最后三个参数 观察的上方面
pcl::visualization::PCLVisualizer viewer("viewer");
std::cout << "初始的姿态矩阵\n" << viewer.getViewerPose().matrix() << std::endl;
viewer.addCoordinateSystem(0.5);
viewer.addPointCloud(cloud_ptr);
viewer.setCameraPosition(0, 0, 0, 1, 1, 1, 0, 1, 0); //视点 方向 上方向
std::cout << "加入相机参数以后\n" <<viewer.getViewerPose().matrix() << std::endl;
viewer.spin();
viewer.setCameraPosition(-1, -1, -1, 1, 1, 1, 0, 1, 0);- 观察点是(-1,-1,-1) 观察方向是(1,1,1),上方向是 Y 轴
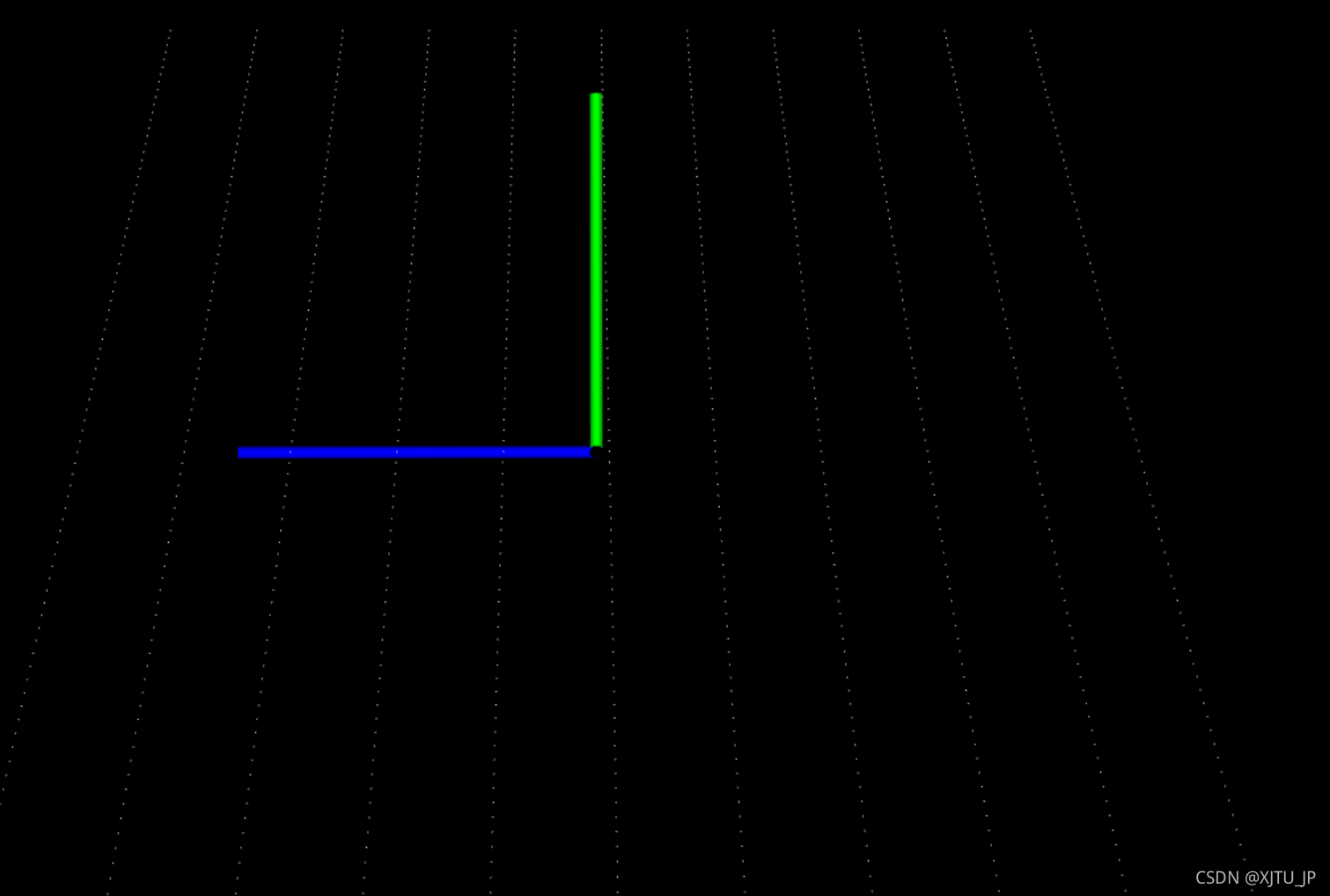
viewer.setCameraPosition(3, 0, 0, -1, 0, 0, 0, 1, 0);- 观察点是(3,0,0) 观察方向是(-1,0,0),上方向是 Y 轴
- 就是站在X轴上,看X的负方向,其中Y是上方向
全部代码
#include <iostream>
#include <pcl/point_cloud.h>
#include <pcl/visualization/pcl_visualizer.h>
/*用来测试角度*/
/*红色是X轴,绿色是Y轴,蓝色是Z,也就是说PCL点云库中使用的是右手三维坐标系。*/
int main() {
//创建点云对象指针和引用
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_ptr(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>& cloud = *cloud_ptr;
//创建随机点云
//这个点云的方向是
for (float y = -0.5f; y < 0.5f; y += 0.01f) {
for (float z = -0.5f; z < 0.5f; z += 0.1f) {
pcl::PointXYZ p;
p.x = 1.0f - y;
p.y = y;
p.z = z;
cloud_ptr->points.push_back(p);
}
}
cloud.width = (uint32_t)cloud.size();
cloud.height = 1;
std::cout << "cloud.sensor_orientation_.matrix() :\n" << cloud.sensor_orientation_.matrix() << std::endl; // x y z 方向 偏移 u
std::cout << "cloud.sensor_origin_\n" << cloud.sensor_origin_ << std::endl;
pcl::visualization::PCLVisualizer viewer("viewer");
std::cout << "初始的姿态矩阵\n" << viewer.getViewerPose().matrix() << std::endl;
viewer.addCoordinateSystem(0.5);
viewer.addPointCloud(cloud_ptr);
viewer.setCameraPosition(3, 0, 0, -1, 0, 0, 0, 1, 0); //视点 方向 上方向
std::cout << "加入相机参数以后\n" <<viewer.getViewerPose().matrix() << std::endl;
viewer.spin();
return 0;
}















 2097
2097











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









