







在惯导系统的初始对准,或者AHRS(航姿参考系统)算法中,我们经常通过一些已知方向或者大小的矢量(比如重力、磁力、地球自转角速率),来计算部分姿态参数。
虽然这些做法已经是老生常谈,但是最近看到一个专利,让自己突然意识到这种思路其实有更加广阔的应用,我们不应该把自己的思维局限在这些有限的、已知的应用中。所以写个博客总结一下自己已知的应用实例,巩固一下这种思维方式,希望自己在未来的技术难题中能借鉴这种思路、迸发灵感。
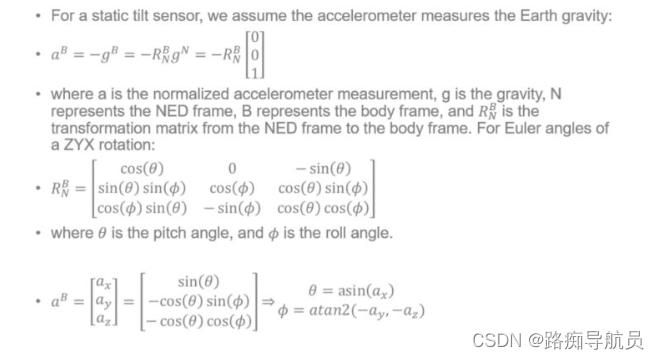
实例一:利用重力在加速度计的三轴分布计算俯仰、横滚
在粗对准中,当载体静止时,通常会根据地球重力在加速度计三轴分布情况,从而计算得到横滚和俯仰。为什么通过加速度只能得到横滚和俯仰,而不能得到航向呢?这个也比较直观,想象一个载体在水平面,转动它的航向,并不能改变重力在加速度计三轴上的分布,但是转动横滚和俯仰却可以。
由于目前加速度计的精度一般都还比较好(多数都能做到
1
0
−
4
g
10^{-4}g
10−4g),相对来说,1g的重力是一个比较大的测量值,所以一般在静止情况下,这种对准方法精度还是不错的。如果选择北东地为地理系N,前右下为机体系B,则利用加速度计测量值计算粗略横滚、俯仰的方法如下[1]:
PX4的ECL开源代码ekf.cpp中也能找到这种初始水平对准计算方法:
bool Ekf::initialiseTilt()
{
const float accel_norm = _accel_lpf.getState().norm();
const float gyro_norm = _gyro_lpf.getState().norm();
if (accel_norm < 0.8f * CONSTANTS_ONE_G ||
accel_norm > 1.2f * CONSTANTS_ONE_G ||
gyro_norm > math::radians(15.0f)) {
return false;
}
// get initial roll and pitch estimate from delta velocity vector, assuming vehicle is static
const Vector3f gravity_in_body = _accel_lpf.getState().normalized();
const float pitch = asinf(gravity_in_body(0));
const float roll = atan2f(-gravity_in_body(1), -gravity_in_body(2));
_state.quat_nominal = Quatf{Eulerf{roll, pitch, 0.0f}};
_R_to_earth = Dcmf(_state.quat_nominal);
return true;
}
实例二:利用地球自转角速率在陀螺的三轴分布计算航向
在粗对准中,如果陀螺的精度比较高(可以敏感地球自转角速率约 15 ° / h 15°/h 15°/h),在静止情况下,可以采用地球自转角速率在IMU的三轴分布来确定航向。
不同的纬度,地球自转角速率不同,且只有北向和地向有值,东向无值。
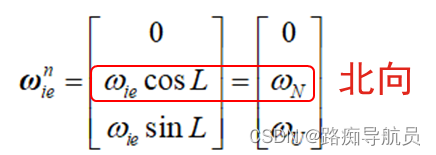
如果已知正确的姿态角,陀螺的测量值经过正确Cbn旋转矩阵从载体系B转到地理系N,由于水平面上只有北向有地球自转角速率分量,因此只有北向的陀螺有值。由实例一可知,在静止情况下通过加速度可以获得俯仰和横滚。在航向角未知的情况下,可以设航向角为0,利用已知的俯仰、横滚将陀螺测量值转到水平面上。
假设航向角为A,那么水平面上陀螺x轴和y轴的分量为:
w
x
=
w
i
e
c
o
s
L
∗
c
o
s
A
w_x = w_{ie}cosL*cosA
wx=wiecosL∗cosA
w
y
=
−
w
i
e
c
o
s
L
∗
s
i
n
A
w_y = -w_{ie}cosL*sinA
wy=−wiecosL∗sinA
因此,通过如下计算即可航向角A:
A = − a t a n 2 f ( w y , w x ) A = -atan2f(w_y, w_x) A=−atan2f(wy,wx)
利用这种方法计算出来的航向精度和纬度、陀螺精度都有关系。在博客惯性导航原理(九)-INS的初始对准-初始姿态确定+双矢量定姿中,分析了用这种方法计算航向的精度与维度之间的关系。如果纬度越高,那么在该纬度的北向地球自转角速率分量就越小(天向分量更大),陀螺自身误差的影响就越大,从而导致计算得到的航向误差会越大。
从该博客和一些参考材料来看,一般认为和“等效东向测量误差”相关:
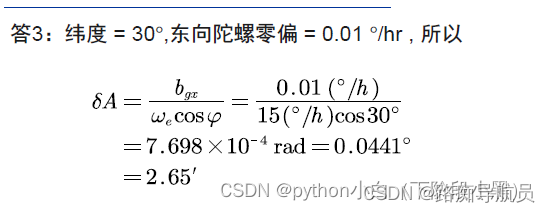
不过我按照上述计算方法推导了一下,分子上的确是“等效东向误差量”,但分母上也包含“等效北向误差量”,不过和wieCosL这部分比起来可能较小,所以可以忽略?

地球自转角速率的量级相对于陀螺精度,其实是一个比较小的量测,因此对陀螺的精度高度要求更高。PX4的ECL中没有这部分的代码,主要原因也可能是无人机所用的IMU一般来说精度偏低,无法通过自对准获得航向信息。
此外,在严恭敏老师的讲义《捷联惯导算法与组合导航原理》中也提到用双矢量定姿法得到初始姿态角。其实本质与实例一、二相同。
实例三:利用地磁在磁力计的三轴分布计算磁航向
利用磁力计获得航向的过程中,通过会利用磁力的分布情况得到磁航向。由于磁力计所测得地磁矢量沿磁感线,如果已知正确的姿态角,磁力计的测量值经过正确Cbn旋转矩阵从载体系B转到地理系N,因为地球磁场的切线在南北方向上,理论上水平方向上只有磁北方向有值。与实例二相同,在航向角未知的情况下,可以设航向角为0,利用已知的俯仰、横滚将磁力计测量值转到水平面上,再通过计算 − a t a n 2 f ( m y , m x ) -atan2f(m_y, m_x) −atan2f(my,mx),即可得到磁航向角。
不过需要注意的是磁北和地理北向之间存在磁偏角,需要根据模型进行修正,才能真正得到航向角。
PX4的ECL开源代码ekf_helper.cpp中的resetMagHeading函数即是用这种方法重置航向角:
// Reset heading and magnetic field states
bool Ekf::resetMagHeading(const Vector3f &mag_init, bool increase_yaw_var, bool update_buffer)
{
// prevent a reset being performed more than once on the same frame
if (_imu_sample_delayed.time_us == _flt_mag_align_start_time) {
return true;
}
// calculate the observed yaw angle and yaw variance
float yaw_new;
float yaw_new_variance = 0.0f;
if (_params.mag_fusion_type <= MAG_FUSE_TYPE_3D) {
// rotate the magnetometer measurements into earth frame using a zero yaw angle
const Dcmf R_to_earth = updateYawInRotMat(0.f, _R_to_earth);
// the angle of the projection onto the horizontal gives the yaw angle
const Vector3f mag_earth_pred = R_to_earth * mag_init;
yaw_new = -atan2f(mag_earth_pred(1), mag_earth_pred(0)) + getMagDeclination();
if (increase_yaw_var) {
yaw_new_variance = sq(fmaxf(_params.mag_heading_noise, 1.0e-2f));
}
} else if (_params.mag_fusion_type == MAG_FUSE_TYPE_INDOOR) {
// we are operating temporarily without knowing the earth frame yaw angle
return true;
} else {
// there is no magnetic yaw observation
return false;
}
// update quaternion states and corresponding covarainces
resetQuatStateYaw(yaw_new, yaw_new_variance, update_buffer);
// set the earth magnetic field states using the updated rotation
_state.mag_I = _R_to_earth * mag_init;
resetMagCov();
// record the time for the magnetic field alignment event
_flt_mag_align_start_time = _imu_sample_delayed.time_us;
return true;
}
参考资料
[1] 如何利用惯性测量单元(IMU)进行动态姿态计算?
[2] Psins代码解析之粗对准(test_align_methods_compare.m)&精对准
[3] US10968606.pdf
[4] 惯性导航原理(九)-INS的初始对准-初始姿态确定+双矢量定姿














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









