







 本文详细介绍了控制系统从时域模型到复域模型的转换,包括微分方程和传递函数的概念、性质及应用。讲解了线性定常系统、非线性系统微分方程的线性化,以及典型环节的传递函数。此外,还阐述了结构图的绘制、等效变换规则,以及梅逊公式在计算闭环系统传递函数中的应用。
本文详细介绍了控制系统从时域模型到复域模型的转换,包括微分方程和传递函数的概念、性质及应用。讲解了线性定常系统、非线性系统微分方程的线性化,以及典型环节的传递函数。此外,还阐述了结构图的绘制、等效变换规则,以及梅逊公式在计算闭环系统传递函数中的应用。
本节介绍数学模型的基础知识。引入控制系统的时域数学模型——微分方程,并介绍其构建、使用方法
引言
什么是数学模型? \colorbox{gray}{\color{white}{什么是数学模型?}} 什么是数学模型?
数学模型是描述系统输入、输出变量以及内部各变量之间关系的数学表达式。
直观来说就是一个公式,可以通过这个公式,用一部分变量求解另一部分变量。
数学模型的建模方法
\colorbox{gray}{\color{white}{数学模型的建模方法}}
数学模型的建模方法
- 解析法(机理分析法)
也就是了解系统的机理,根据系统工作时的物理定律写出方程。
比如已知输入输出之间接了R电阻,那么根据欧姆定律就有:U入-U出=I ·R - 实验法(系统辨识法)
也就是给系统施加测试信号,记录输出响应,并用适当的数学模型去逼近系统的输入输出特性。
比如有一个黑箱,输入1时输出1,输入0时输出0,虽然不知道系统内部的原理,但依然可以用U出=U入来描述这个系统。所以这个方法也被称为黑箱建模法
控制系统的数学模型 \colorbox{gray}{\color{white}{控制系统的数学模型}} 控制系统的数学模型
- 时域模型——微分方程
- 复域模型——传递函数
时域模型和复域模型本质上是一样的。只是微分方程求解往往比较困难,所以常转换到复域,利用传递函数描述系统。
控制系统的时域模型——微分方程
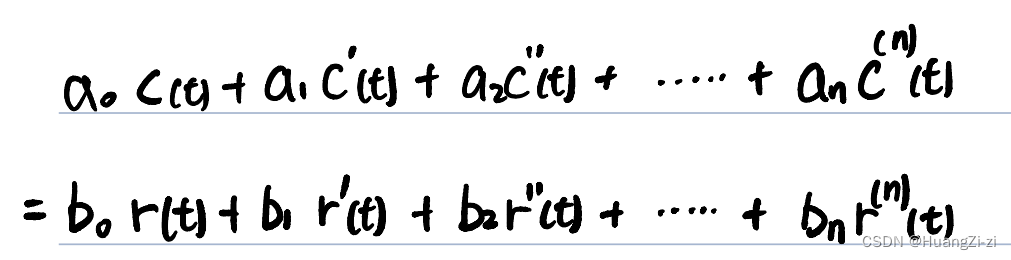
线性定常系统微分方程的一般形式
线性:即满足叠加定理。也就是方程没有常数项,且一侧只包含输入及其导数而另一侧只包含输出及其导数。
定常:方程各项的系数都是常数。
在这个系列文章中,“R”表示输入(ru的首字母)
“C”表示输出(chu的首字母)
几个典型的例子
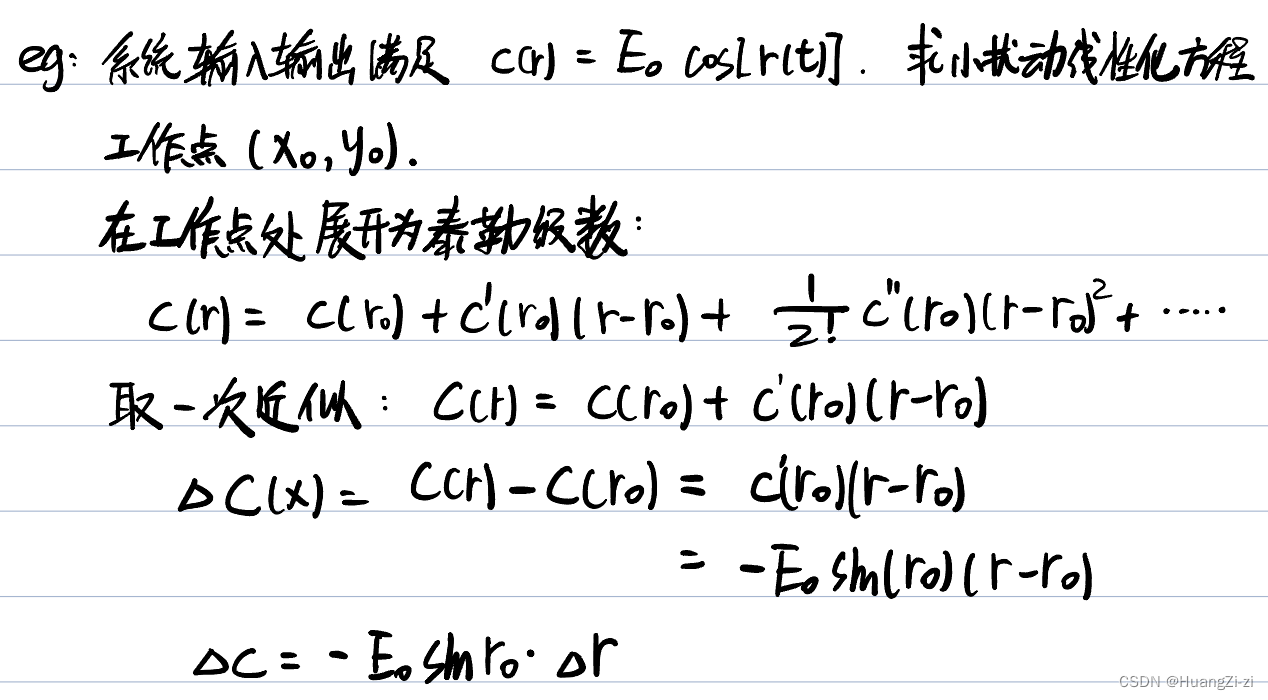
RLC电路系统
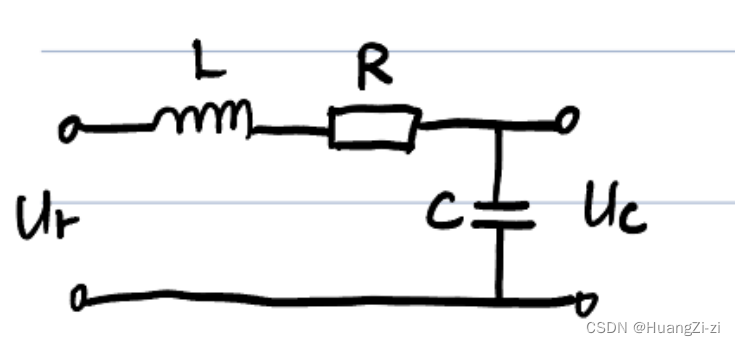
要探究输入电压与输出电压之间的关系,就需要利用到电路里面的基本定理。
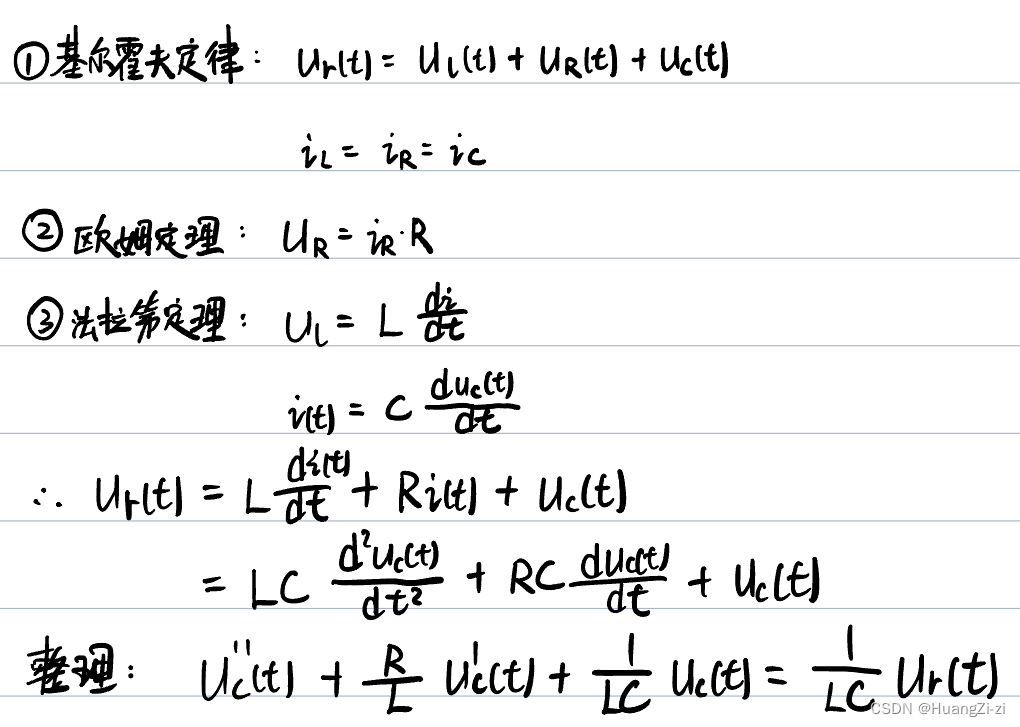
首先回路电压之和为零,可以得到关于输入和输出的一个方程。然后按照各个元件的特性进行分析。在这里电流I是一个中间变量,所以应该尽量用输入或者输出量将其表示,然后代入最基础的等式化简得到微分方程。
至于最后进行同时除LC的整理,因为
L
R
\frac{L}{R}
RL和
R
C
RC
RC的量纲都是“秒(s)”,因此也称这两个量为电路网络的时间常数。时间常数决定了方程的解,也就决定了电容上电压(Uc)随时间变化的快慢。
整理后的方程也就可以化成如下的形式:
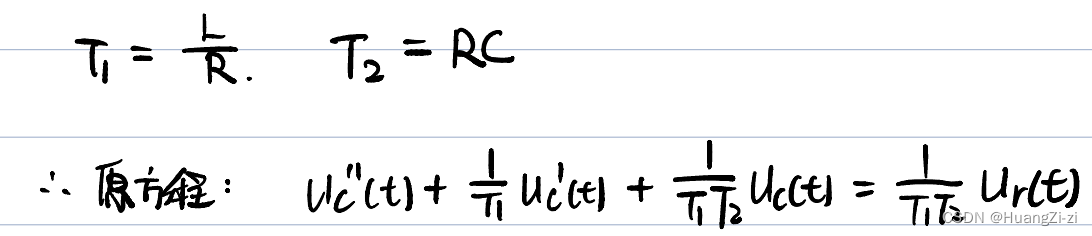
(可以使方程更加简洁,物理意义更加清晰)
机械动力学系统
上下两个弹簧,中间接一个阻尼器,输入量为阻尼器上方位移输出量为阻尼器下方位移
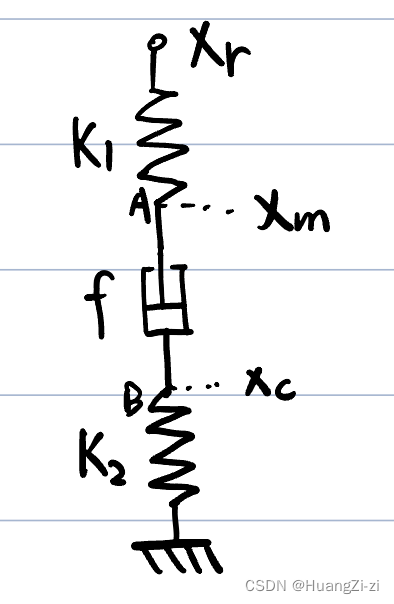
其中,阻尼力是指阻尼器产生的黏性摩擦阻力,其大小与阻尼器中活塞和缸体的相对运动速度成正比。f为阻尼系数。
阻尼器本身不存储任何动能和势能,主要用来吸收系统的能量。默认情景为平衡状态,也就是作用在阻尼器上下的力相同,刚好等于内部的黏性摩擦阻力。
同样消去中间变量Xm。首先联立Fr=Fc,得到Xm的表达式,然后求导得到Xm’的表达式。然后联立Ff=Fc,再次得到Xm’的表达式,两式恒等得到关于输入和输出的方程。同样进行化简,是因为
f
k
\frac{f}{k}
kf的量纲为秒(s)
更加复杂的系统建立微分方程可能会更加复杂,但基本思路是一样的,根据物理原理列出元件的相关方程,消去中间变量,得到输入和输出之间的关系。
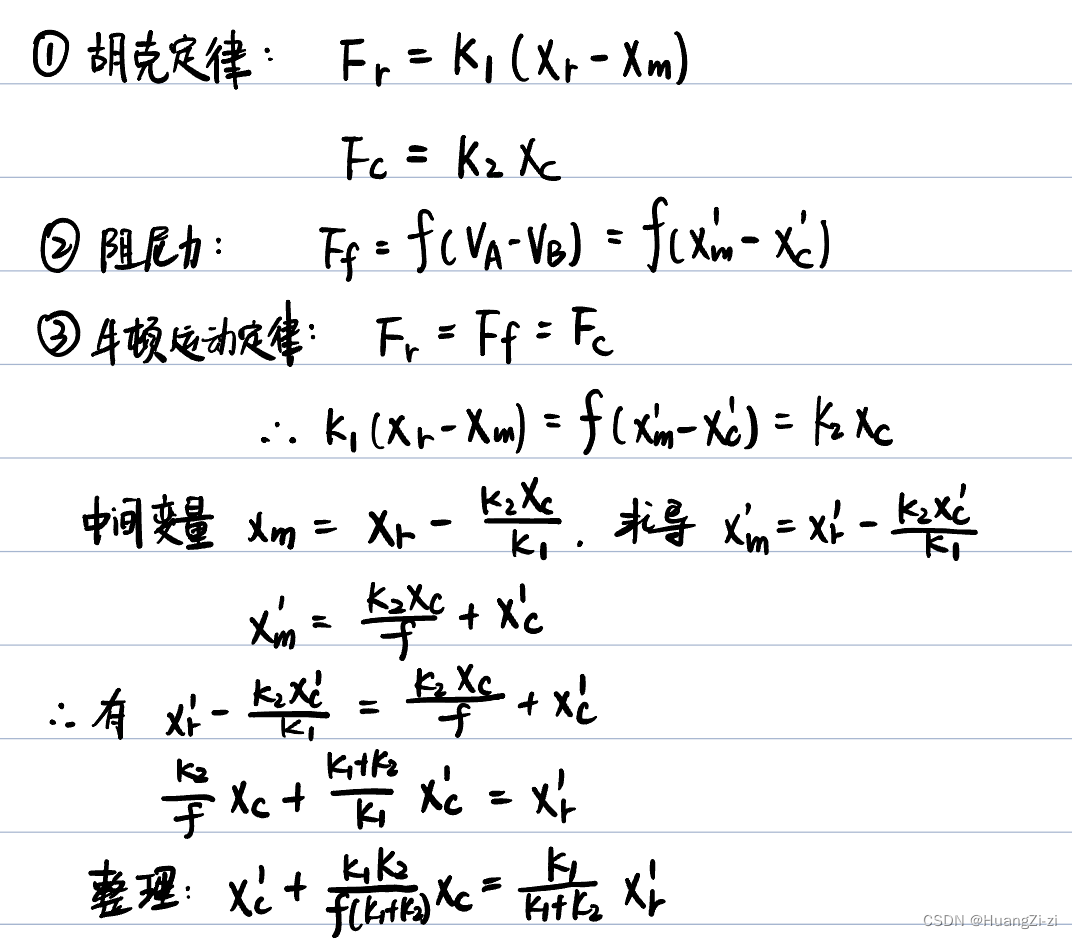
非线性系统微分方程的线性化
一般来说并不讨论过多的非线性系统的内容。所以这些内容只是浅浅略过一下。非线性系统要建立线性的微分方程,可以利用泰勒展开的方法:
微分方程的求解
利用拉氏变换,用留数法分解,再用查表法解方程
「自控原理」1.2 复变知识回顾
这里以例题的形式进行讲解
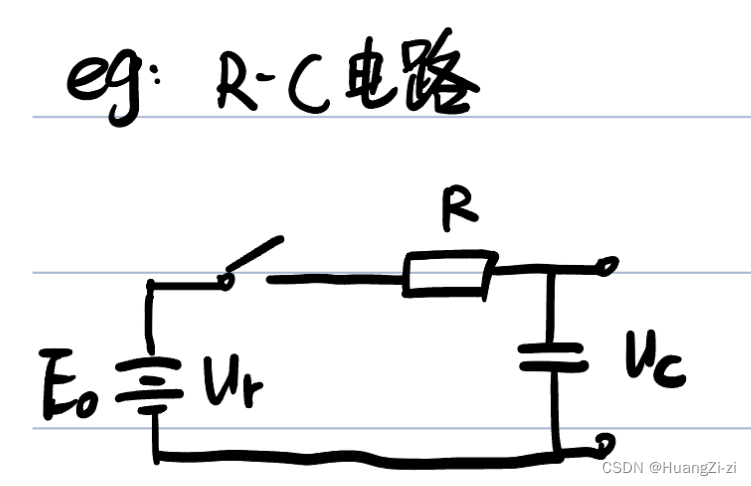
要求开关闭合后响应的函数

如果直接看微分方程,要解出Uc是非常困难的。但是如果进行拉氏变换,再反变换回来,就可以比较方便的求出Uc了。

















 1976
1976

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









