







 本文深入介绍卡尔曼滤波算法,先通过小车示例感性认识,阐述其使用条件、原理、应用领域等。接着进行理论储备,介绍概率相关概念。然后推导KF,分析无法得到真实值的原因,给出预测模型、先验估计等内容,还提及初始参数取值,最后指出其与状态观测器的关系。
本文深入介绍卡尔曼滤波算法,先通过小车示例感性认识,阐述其使用条件、原理、应用领域等。接着进行理论储备,介绍概率相关概念。然后推导KF,分析无法得到真实值的原因,给出预测模型、先验估计等内容,还提及初始参数取值,最后指出其与状态观测器的关系。

卡尔曼看波不滤波
0.前言
读研究生时,不知听谁说过:研究滤波算法毕业足够了。这句话足够证明滤波算法在控制领域扮演着一个重要的角色,因为如果一个优秀的滤波算法得到应用,即使pid算法的控制性能也能吊打很多当前热门的如mpc、滑膜、反步法、深度学习等智能控制算法。什么是卡尔曼滤波算法,它作用是啥,应用领域是啥,它的优缺点是啥,限制条件是啥,发展瓶颈是啥,当前的研究焦点是啥,接下来请各位读者与我一起进入卡尔曼的其妙世界去探索答案吧…
1. 感性认识卡尔曼滤波
(1)有一辆小车,在一个水平轴上向右行驶,它的初始位置我是用脚测量的,非常不准,但我能确定这个位置在一个高斯分布的范围内,如图:
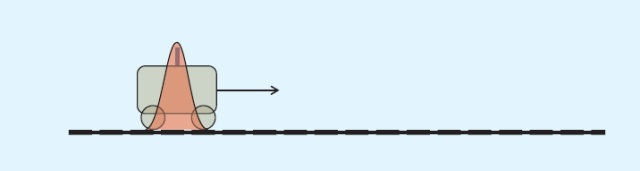
(2)此外,我还可以用眼睛大概看出来小车的速度,现在我就可以根据我刚刚用脚测得的位置和我目测的速度,大概估计下一秒它的位置,它大概运动到了这个位置:

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 3631
3631

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









