







雷迅文档
0. 飞控
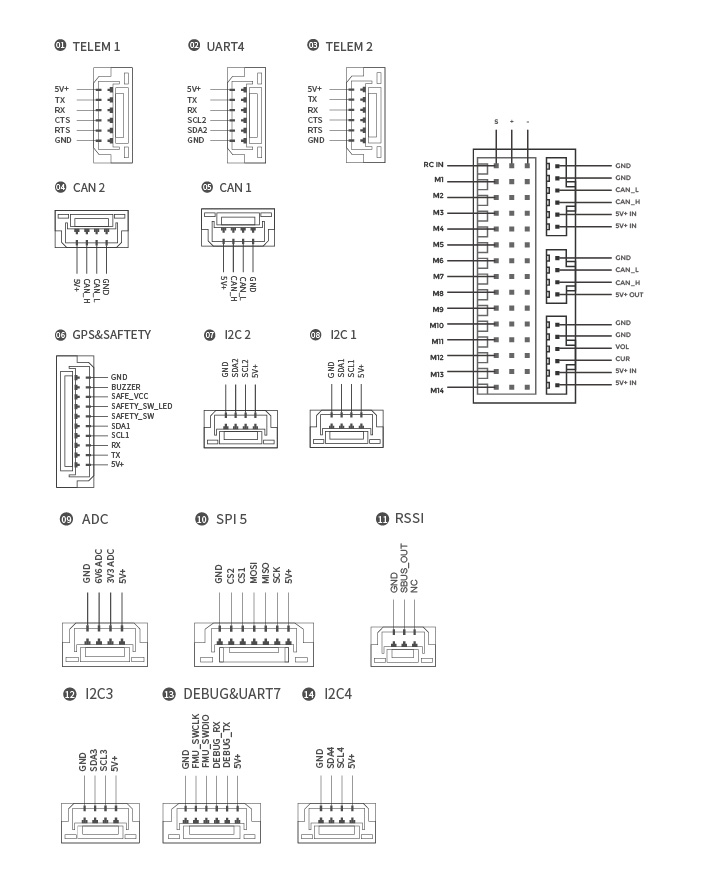
0.1 X7+ pro
- 文档
- 接口定义
1. 数传
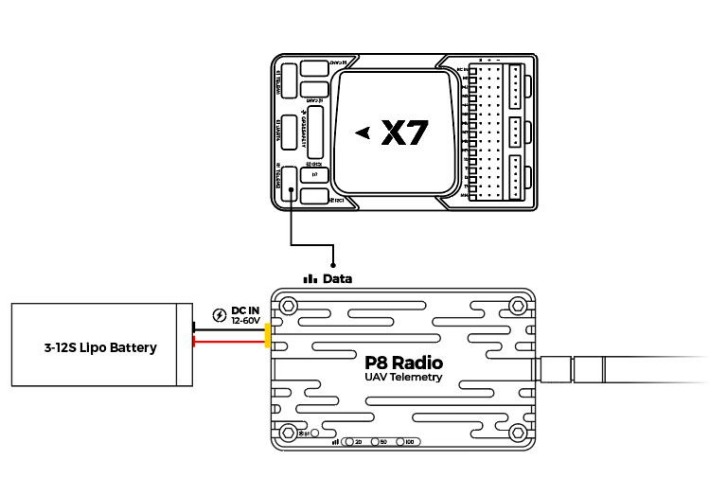
1.1 CUAV P8 Radio

规格
工作频率 840-845MHZ
工作温度 -40°C~85°C
极限距离:60km+(高增益玻璃钢天线+无遮挡海边、理想环境)
参考距离:40km(地对空,郊区无遮挡)
接线
串口连接
PixHack系列:插入到飞控的radio接口。
V5+/V5 NANO/X7系列: 使用专用配线,绿色连接器端接飞控TELEM1/TELEM2接口,白色连接器端接数传。
Ardupilot 参数配置
根据连接的串口来配置串口参数,如:
SERIAL1_PROTOCOL = 2 MAVLink2
SERIAL1_BAUD = 57 波特率
参考文献
CUAV P8 Radio
2. 电源检测模块
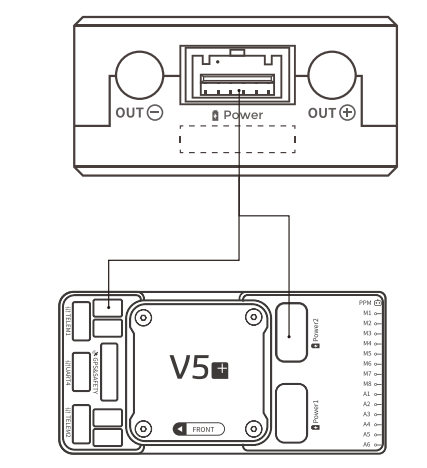
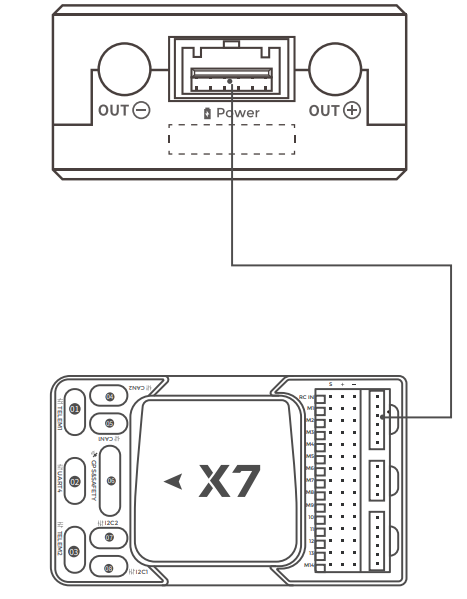
2.1 CAN PMU数字高精度电源检测模块
它采用先进测CAN总线通信,支持标准的UAVCAN协议;

接线
V5+:
X7:
Ardupilot 参数配置
CAN_P1_DRIVER = 1
CAN_P2_DRIVER = 1
BATT_MONITOR=8(如果使用监视器1)
Uavcan_enble设置为sensors Automatic config(自动配置)
注意:请使用AC3.6/AP3.9(含)以上版本的固件
3. GNSS定位模块
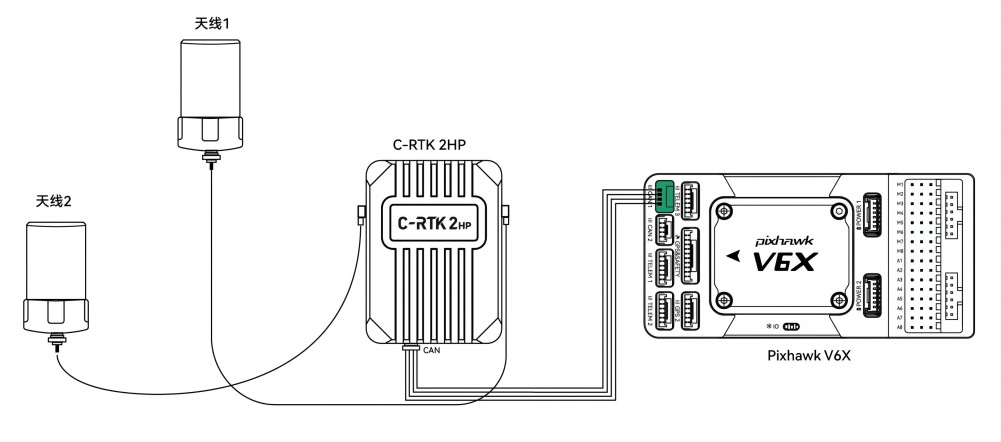
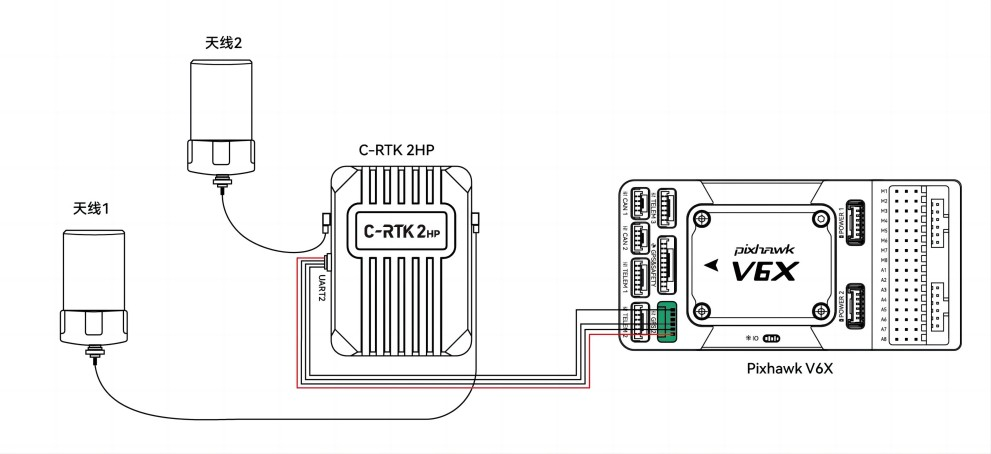
3.1 C-RTK 2HP(只能当做移动站使用)
单模块双天线定向,厘米级定位精度,内置工业级罗盘
规格
定位模块 全星多频双天线定位模块
传感器 磁罗盘:RM3100 加速计&陀螺仪:ICM42688
定位精度 单点定位:水平 1.5M/ 高程 2.5m DGPS( 辅助定位 ): 水平 0.4M+1PPM/ 高程:0.8m+1PPM RTK: 水平 0.8cm+1PPM/ 高程:1.5cm+1PPM
定向精度 0.2 度 /1m(天线 1 与天线 2 距离)
工作温度 -20~85℃
接线
使用can连接
使用串口连接
Ardupilot 参数配置
注意:C-RTK2 HP支持ArduPilot 4.4.0及以上版本固件。
1)启用C-RTK2 HP
GPS_TYPE = 9(droncan:9;UART:25)
CAN_P1_DRIVER = 1(CAN1驱动)
EK3_SRC1_YAW = 2(GPS)或3(优先使用GPS,罗盘作备份)
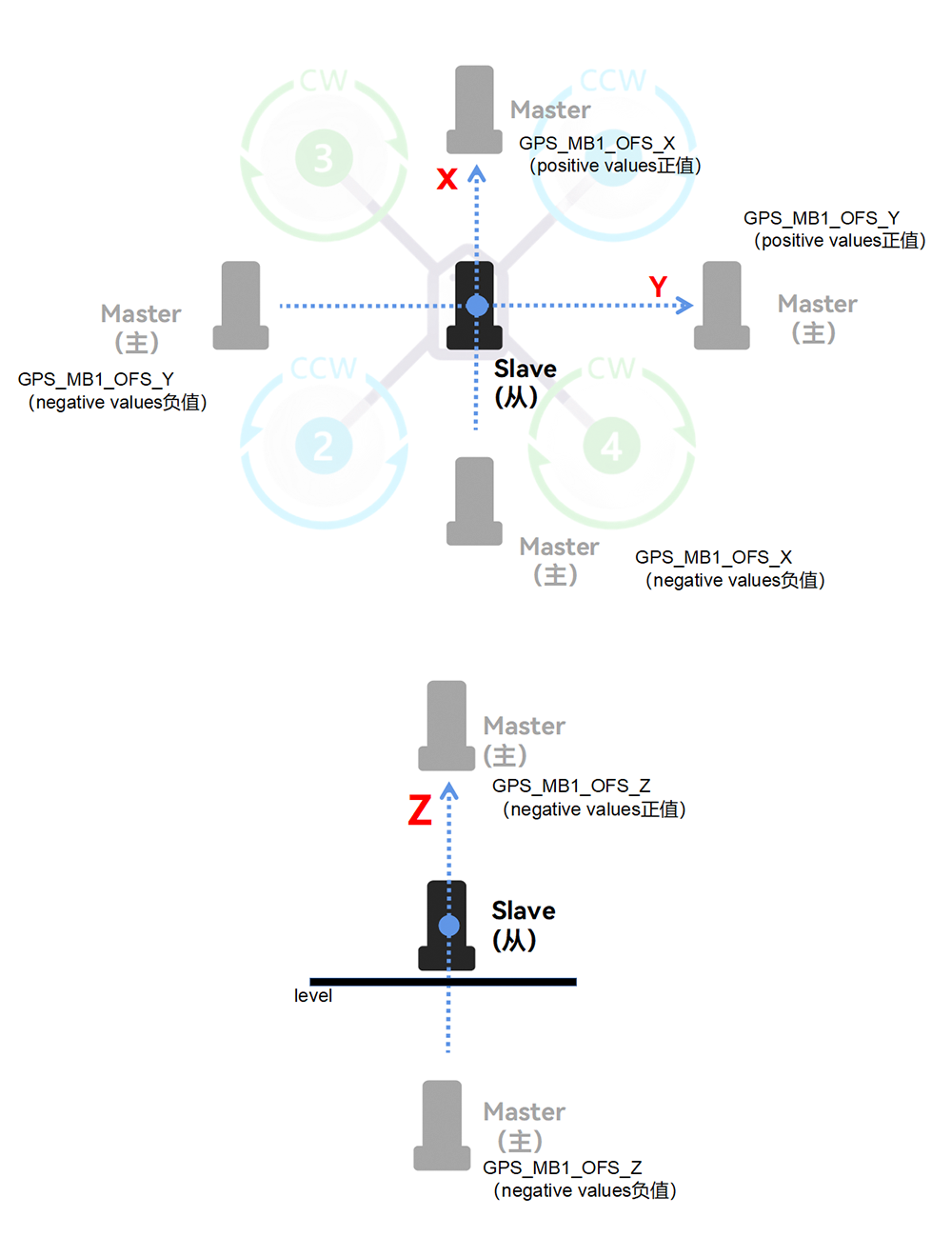
2)主从天线偏移
GPS_MB1_TYPE = 1(GPS1移动基站主天线相对于从天线的偏移量,修改后刷新参数可以显示下一个参数)
GPS_MB1_OFS_X:主天线相对于从天线的X轴偏移量(距离,以米为单位),如果主天线在从天线的前面为正值。
GPS_MB1_OFS_Y:主天线相对于从天线的Y轴偏移量(距离,以米为单位),如果主天线在从天线的右侧为正值。
GPS_MB1_OFS_Z:主天线相对于从天线的Z轴偏移量(距离,以米为单位),如果主天线低于从天线,则为正偏移量。
3)GPS定位偏移
GPS_POS1_X:主天线相对于重心的X轴偏移量(距离,以米为单位),如果主天线在重心的前面为正值。
GPS_POS1_Y:主天线相对于重心的Y轴偏移量(距离,以米为单位),如果主天线在重心的右侧为正值。
GPS_POS1_Z:主天线相对于重心的Z轴偏移量(距离,以米为单位),如果主天线低于重心位置为正值。
4)2HP固件中的参数
与ardupilot中的参数相同,但是GPS_TYPE要设置为25而不是9。

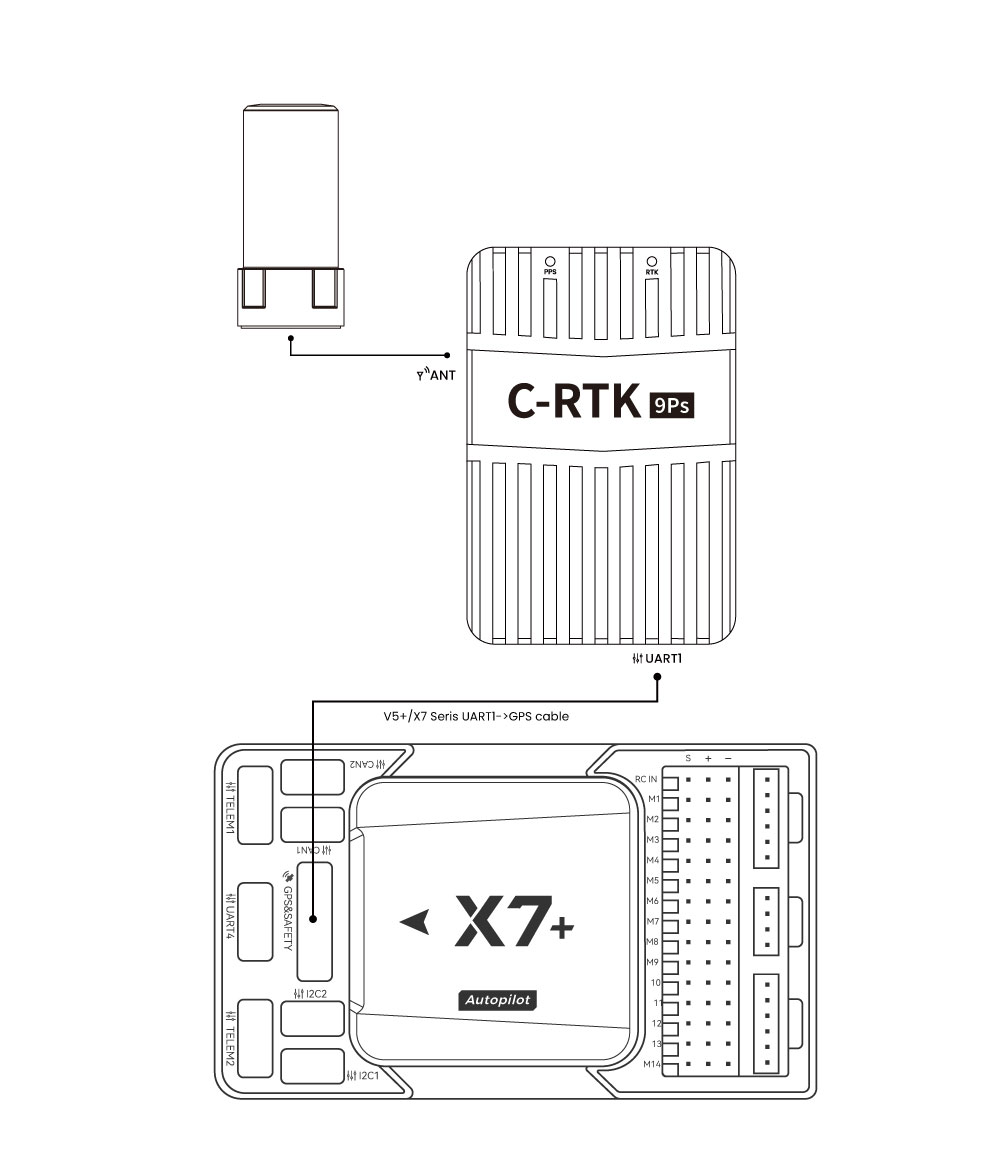
3.2 C-RTK 9Ps厘米级定位模块(可当做移动站、RTK基站使用)
可以使用2个C-RTK 9Ps模块(一个做飞机端、一个做基站端)组成完整的多星多频RTK定位系统;并且支持双天线测向功能。

规格
定位精度
RTK定位:0.01m+1ppm CEP
单点定位:1.5m CEP;
SBAS辅助定位:1.0m CEP
双天线测向 支持(需两个定位模块);航向精度:0.4edg(参考值)
RTK基站/移动端切换 支持
工作温度 –40 °C 到 +85 °C
3.2.1 单模块+单天线
单模块单天线模式下,不能测向。
硬件准备:C-RTK 9Ps移动端、USL扩展集成器。
接线
连接到GPS1:
使用USL模块(GPS+安全开关):
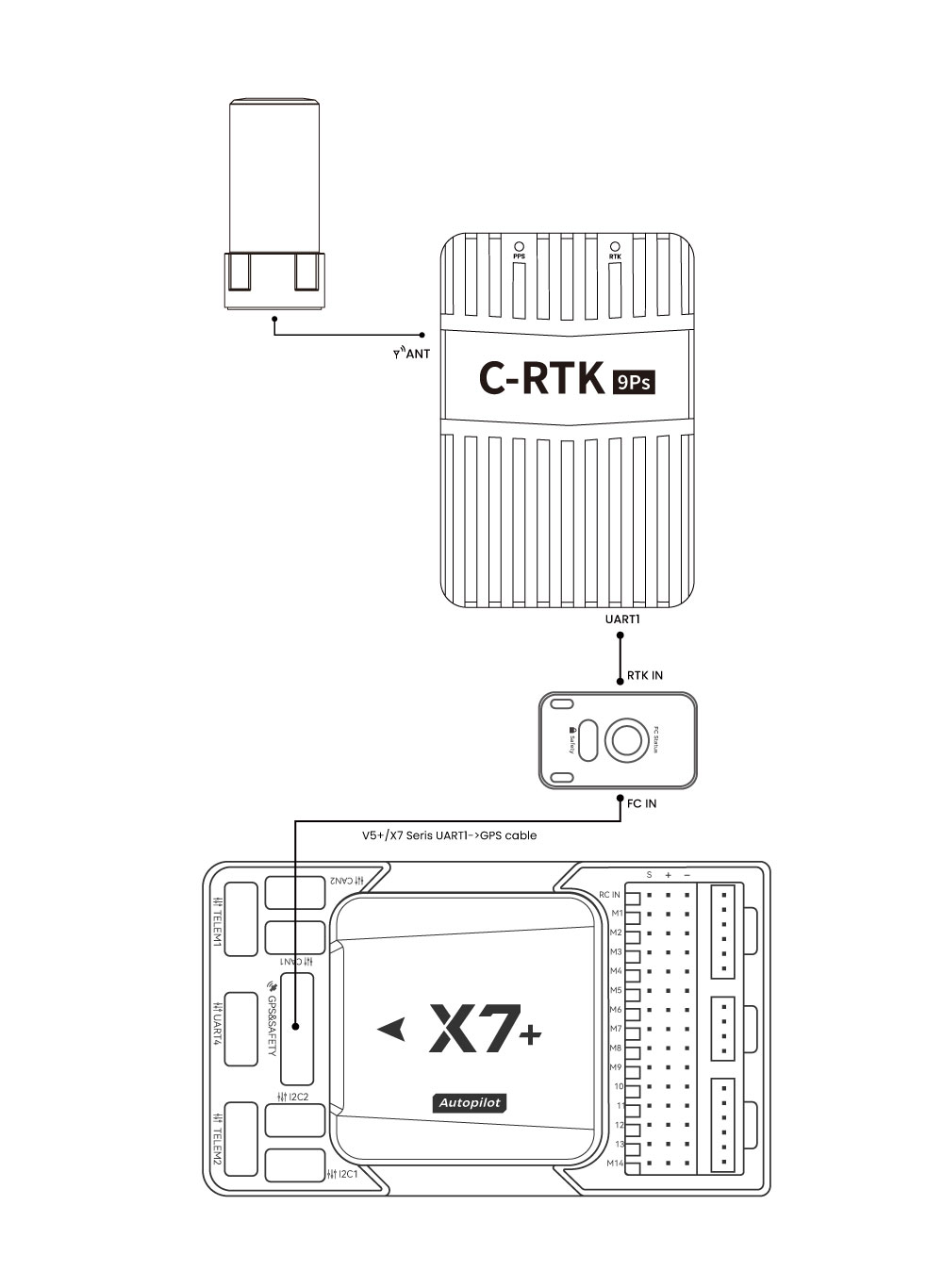
Ardupilot 参数配置
GPS_TYPE = 1
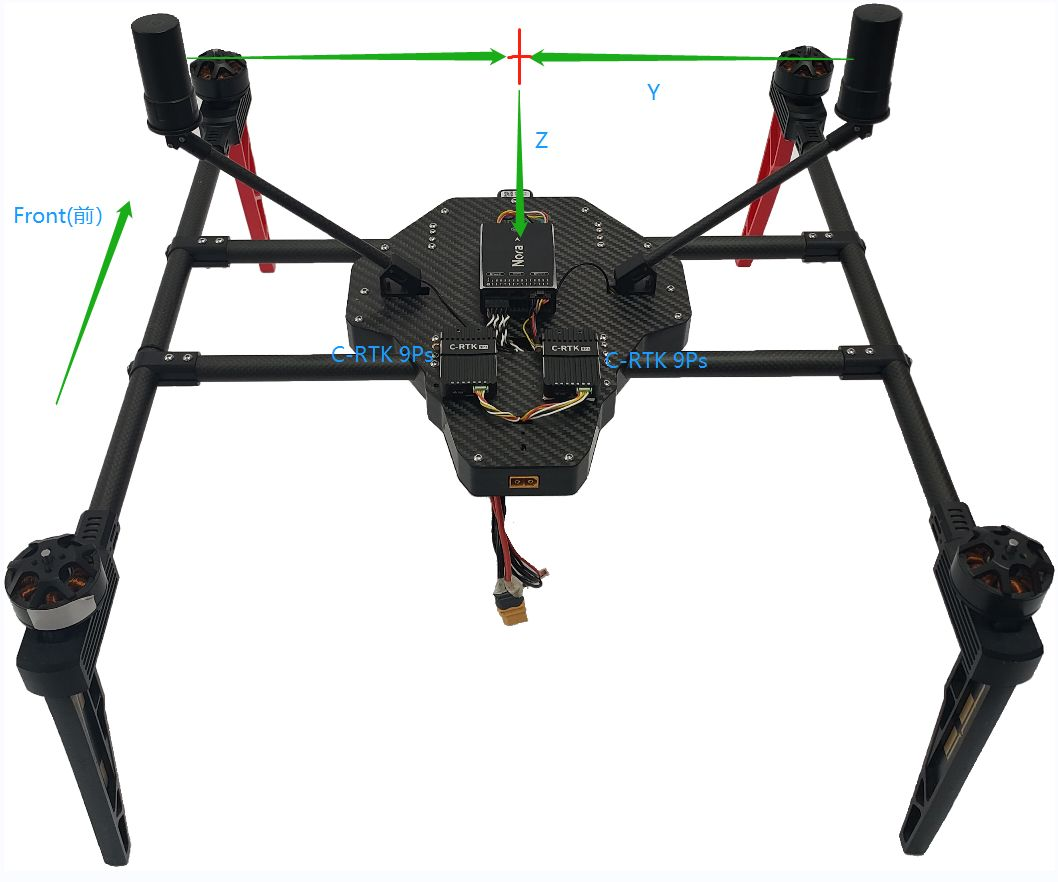
3.2.12 双模块双天线
双模块双天线可以实现定向功能。
硬件准备:C-RTK 9Ps移动端*2
接线
两个RTK模块各接一个天线,模块安装距离没有要求;
两个天线安装的水平距离相隔至少30厘米,距离越大方向精度越高;
第一个C-RTK 9Ps模块接X7+飞控GPS接口(UART3),第二个模块连接到7+飞控UART4接口。
Ardupilot 参数配置
1)启用GPS
SERIAL4_PROTOCOL = 5(“ GPS”)(如果连接到UART4)
GPS_TYPE = 17(“ 移动基准站模式”)
GPS_TYPE2 = 18(“ 移动基线流动站”)
2)设置GPS位置偏移量
GPS_POS1_X=?(天线在重心前方为正,天线在重心后方为负)
GPS_POS1_Y=?(天线在重心右侧为正,天线在重心左侧为负)
GPS_POS1_Z=?(天线在重心上方为正,天线在重心下方为负)
GPS_POS2_X=?(天线在重心前方为正,天线在重心后方为负)
GPS_POS2_Y=?(天线在重心右侧为正,天线在重心左侧为负)
GPS_POS2_Z=?(天线在重心前方为正,天线在重心后方为负)
EK3_SRC1_YAW=2(“GPS”)或 3(当GPS航向不可用时,切换磁罗盘)
3)航向源设置
EK3_MAG_CAL = 5(“使用外部偏航传感器”),ardupilot官方文档推荐使用默认值3 ??
3.3 RTK基站设置
3.3.1 自设RTK基站
硬件:C-RTK 9Ps 基站端。
接线
使用三脚架将基站端的天线架高,使用馈线连接天线和基站端。

Mission planner配置RTK基站
打开您电脑上的 Mission Planner 地面站软件,
进入初始设置(initial setup)
点击可选硬件(Optional Hardware)
点击RTK/GPS Inject(如无该界面请把mission plnner升级到最新版本),您会看到以下页面:
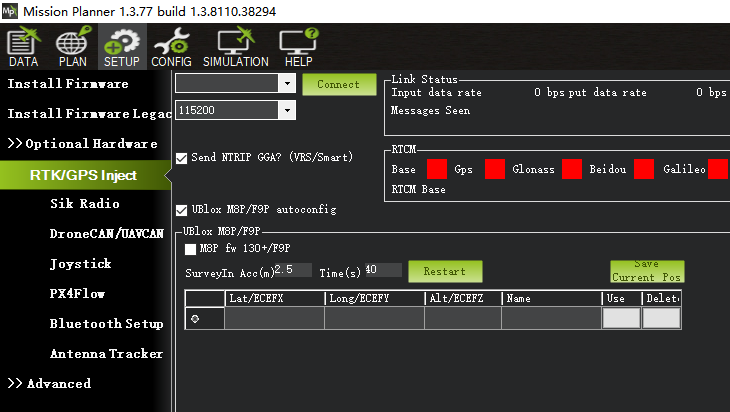
设置左上角的基站端口
点击 connect(连接)
勾选"M8P/F9P autoconfig"
点击 Restart(重新开始)(地面站就会将您输入的数据传输到C-RTK基站,基站将会开始新一轮的搜星定位工作)

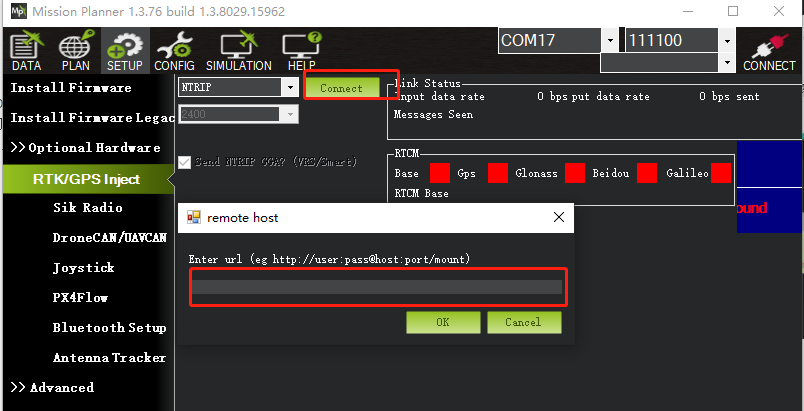
3.3.2 使用CORS(NTRIP)基站(网络RTK基站)
Missionplanner支持通过NTRIP协议应用CORS服务作为RTK基准站。
国内常见的CORS账号运营商有千寻、腾讯、中国移动等;可在淘宝商城等渠道购买。
RTK定位状态:RTK Fixed>RTK Float>3D RTK
4. 遥控器
4.1 siyi MK32(图数传一体)

规格
标准天线:15km传输距离
增城天线:30km传输距离
工作环境温度: -10℃~ 50℃
通道数:16
接线
接飞控的SBUS(RC IN)、UART1或UART2(telem1或temem2)

Ardupilot 参数配置
根据连接的串口来配置串口参数:
SERIAL1_PROTOCOL = 2 MAVLink2
SERIAL1_BAUD = 57 波特率
或:
SERIAL2_PROTOCOL = 2 MAVLink2
SERIAL2_BAUD = 57 波特率
5. 附录
5.1 硬件参数
X7

X7 pro

5.2 UART串口映射
X7+/X7+ Pro:
SERIAL0 = console = USB
SERIAL1 = Telemetry1 = USART2
SERIAL2 = Telemetry2 = USART6
SERIAL3 = GPS1 = USART1
SERIAL4 = USER = UART4
SERIAL5 = USER = UART8
SERIAL6 = USER = UART7
SERIAL7 = USER = OTG
参考文献:https://doc.cuav.net/flight-controller/x7/zh-hans/x7-pro.html

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









