







实现效果:
两台电脑,一台Win10的电脑跑虚拟仿真环境(LGSVL simulator 2021.3),另一台Ubuntu1804电脑跑自动驾驶框架(Autoware 1.14),通过无线或有限两种连接方式。仿真、计算分开部署,减轻单台计算机性能压力。
实现步骤:
- 官网下载Windows程序包,免安装直接运行
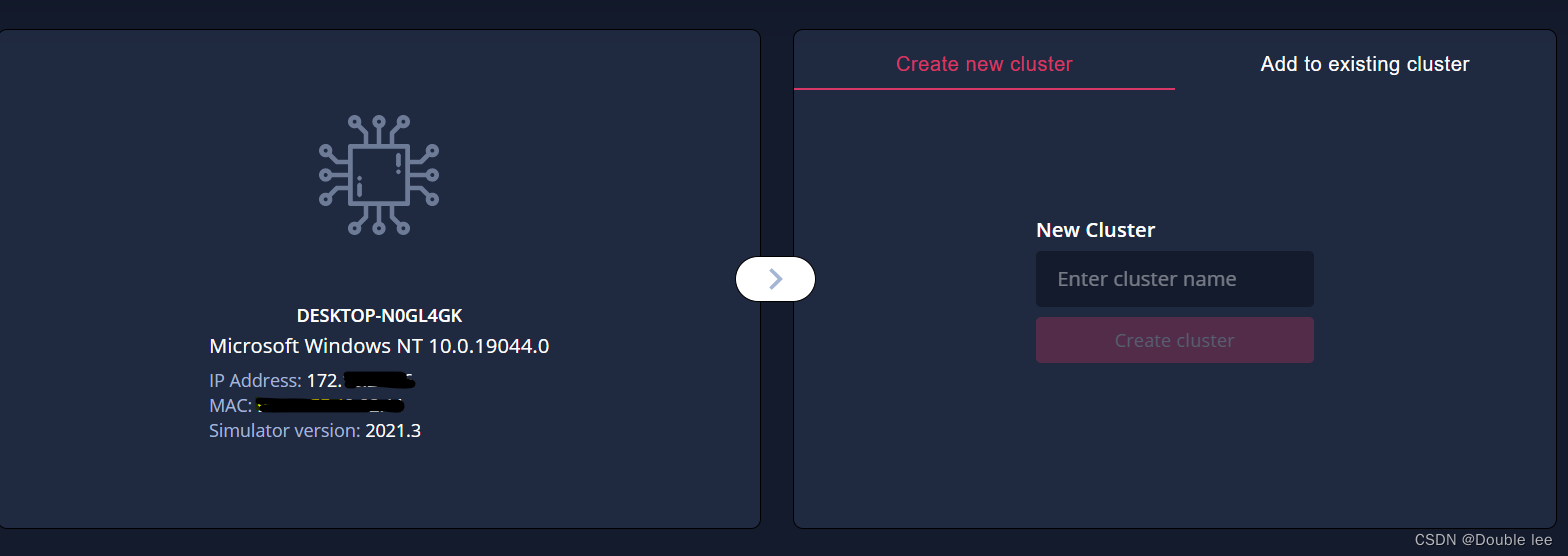
- 初次连接,Link to cloud

- 在云端设置new cluster, 新建一个计算集群(Cluster是用来跑这个虚拟环境的计算集群,可以是一台电脑,也可以是很多台)
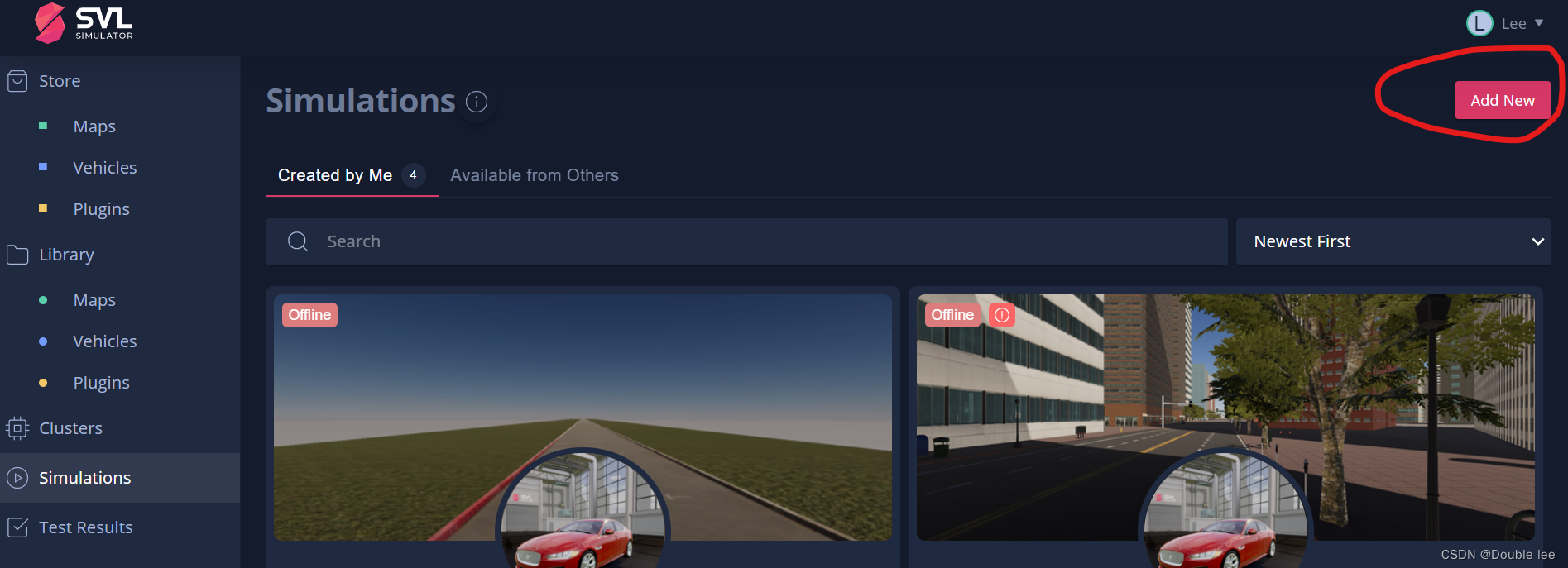
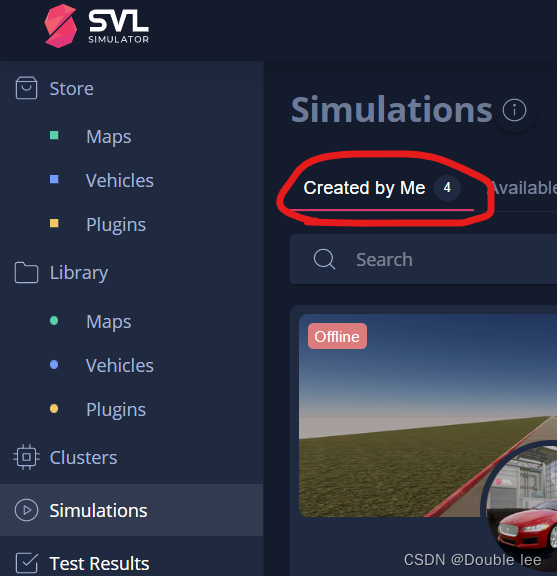
- 在左侧simulations菜单中选择 add new,新建一个仿真环境
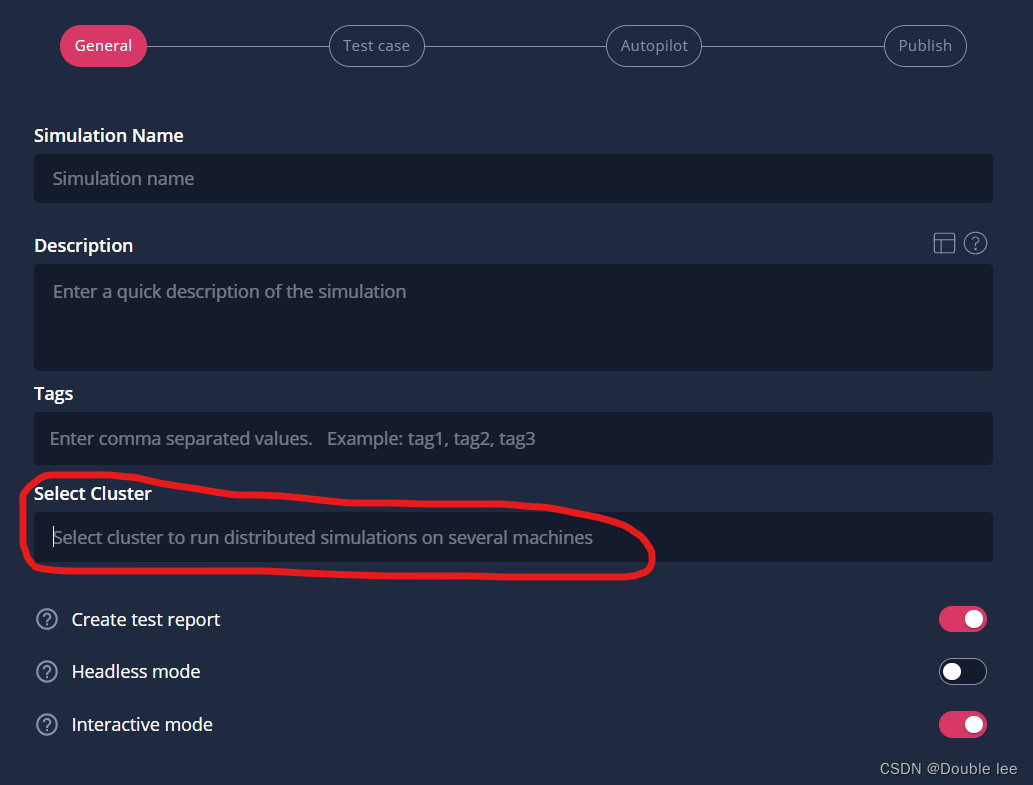
- 这里选择仿真所需要的Cluster计算集群
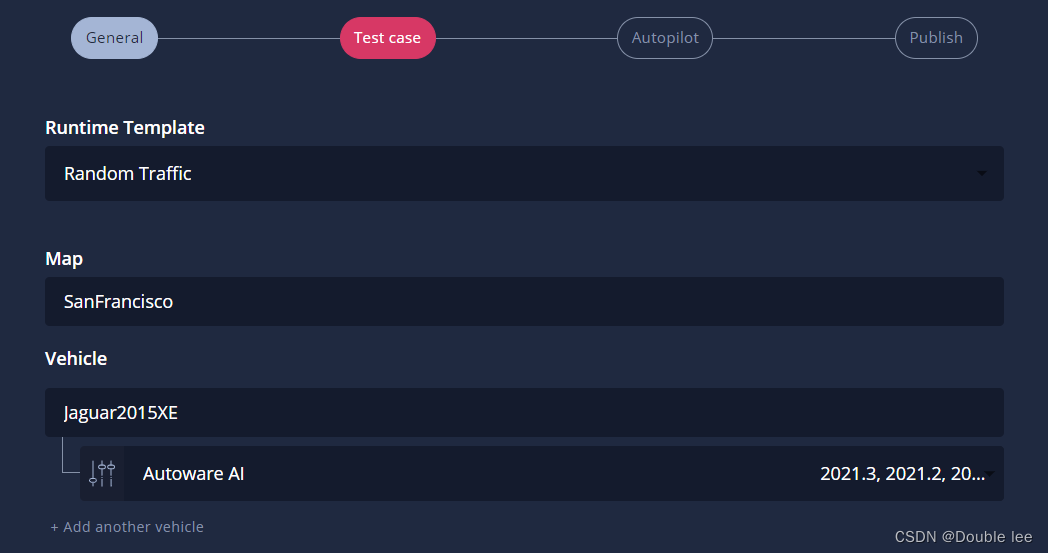
- 设置地图和车辆,车辆传感器配置选择Autoware AI
- 这里设置控制器的IP,是ubuntu系统的IP地址
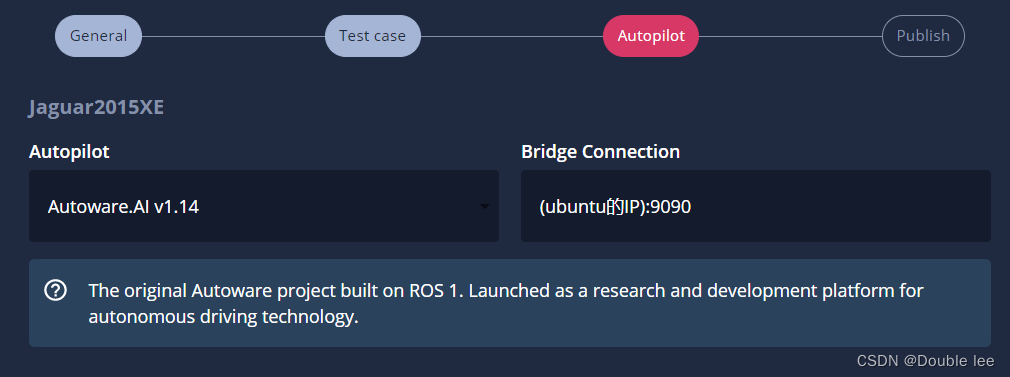
- 最后Publish即可
- 在Simulations中找到对应仿真,run它
- 待初次下载好地图,车辆等文件后,打开界面

Bridge Status 显示连接状态Disconnected - 返回autoware中simulation菜单下,点击
LGSVL simulator
若无法出现上述界面,参考解决方案
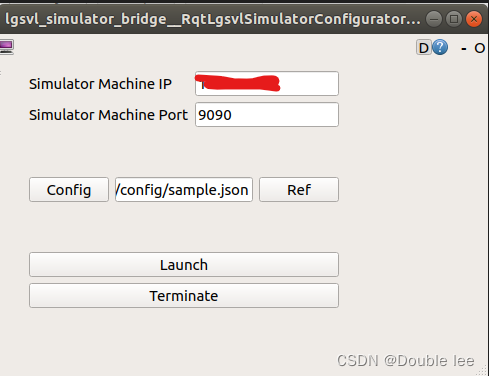
在Simulator Machine IP中输入win10电脑的IP,端口号要和LGSVL中设置的对应。config不用管,直接launch。 - 不出意外,LGSVL中bridge status 显示为
connected,然后点击LGSVL中的播放▶按钮 - 此时在autoware中Topics菜单下,Refresh即可看到由LGSVL传过来的一下
topics,比如点云数据/points_raw、摄像头数据/image_raw等等。 - Enjoy~
以上就是Autoware与LGSVL连接的主要步骤,关键点在于设置好两处IP地址
Autoware中设置 LGSVL电脑所在的IP
LGSVL中设置 Autoware电脑的IP
至于连接方式
无线方式
上述两台电脑连接在同一局域网内,查看各自的IP
ubuntu内终端(ctrl+alt+t)输入ifconfig,查到wlp3s0下inet
win10内终端(win+R >cmd)输入ipconfig,查到ipv4地址
可在终端内分别ping对方电脑的IP看是否ok
有线方式
无线方式有些延时,推荐有线直连,用网线直接连接两台电脑💻
在win10系统内找到控制面板>网络连接>选中有线网卡

右键属性,选中TCP/IPv4,属性
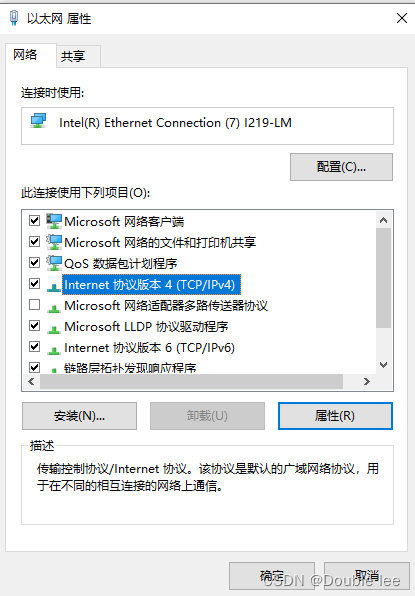
设置手动IP
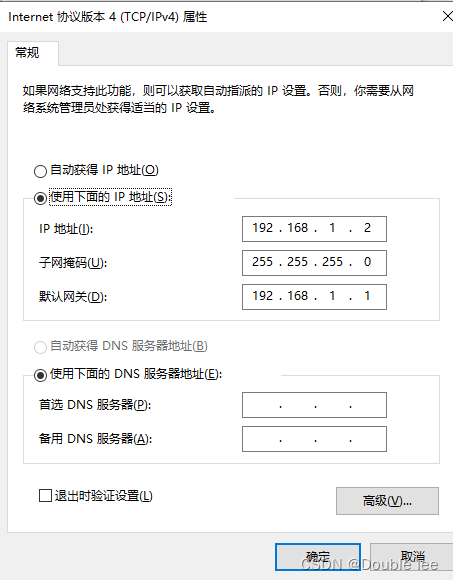
子网掩码设置255.255.255.0 默认网关设置192.168.1.1IP地址设置为198.168.1.2,保存退出
在ubuntu中同样打开设置>网络>有线连接设置>IPv4>方式设置为手动>配置如下

保证ubuntu和win10中的网关设置相同,子网掩码相同,IP不相同,保存即可
可在终端内分别ping对方电脑的IP看是否ok
不管是有线还是无线,只要在Autoware和LGSVL中设置好对应的IP都可以连接上
以下为测试图,笔记本跑Autoware,台式机跑LGSVL,低配置电脑运行无压力

补充
下载autoware-data以备不时之需。
这是lgsvl提供的地图文件、传感器矫正文件、坐标转换文件等。
注意:autoware-data中launch文件的默认的地址是(env HOME)/shared_dir/autoware-data/
——————————————————
欢迎大家点赞、转发、收藏爱心❤














 2044
2044











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









