







组合导航(三):GPS全球定位系统
全球定位系统(GPS)由美国国防部在20世纪70年代开发。GPS的定位基础是24颗卫星组成的网络。每颗卫星发送一个包含伪随机噪声(PRN)码与导航信息的无线电信号。接收机通过PRN码获得无线电信号的传输时间,传输时间乘以光速可初步计算卫星与接收机之间的距离(称为伪距离)。
根据导航信息计算卫星的位置。根据三颗卫星提供的信息,接收机通过三边测量法计算出自身的纬度、经度和高度;可根据第四颗卫星的信号来消除接收机的时钟偏差。
1. GPS 观测
GPS观测主要有伪距测量、载波相位测量和多普勒测量三种
1.1伪距测量
伪距是卫星和接收机之间距离的度量。
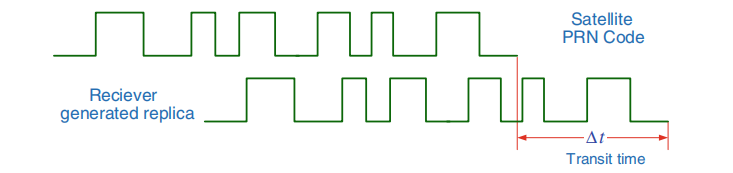 传输时间由导航消息计算,接收时间由接收信号(PRN码)与其接收方生成。伪距( p )的计算方法是取这些时间的差值,并将其与光速 c 相乘:
传输时间由导航消息计算,接收时间由接收信号(PRN码)与其接收方生成。伪距( p )的计算方法是取这些时间的差值,并将其与光速 c 相乘:

实际的伪距测量包含了很多干扰因素:


1.2 载波相位测量
接收机到卫星的距离也可以通过载波信号的相位来测量。
GPS接收机可以精确地测量一个周期的分相,但是从卫星到接收机的完整周期的总数最初是未知的。这称为整数模糊(IA)。IA解析后,通过将载波波长乘以完整周期(N)和小数部分,可以计算出距离,这个距离比PRN码计算出的距离精确得多。

考虑时钟偏移、大气延时、以及测量误差,可得到以下式子:

其中:
将上式与波长相乘,可将载波相位测量转换为米的单位:

1.3 多普勒测量
多普勒效应是由发射器和接收器的相对运动引起的电磁信号的频移。
基于这一现象,一些GPS接收机也通过测量接收信号的多普勒频率来计算用户的速度。
发射信号的多普勒频移( fd )、视线距离率( r )和波长之间的关系为:

2. GPS信号
GPS最初以两个频率发送测距信号。
GPS卫星在两个无线电频率L1和L2(分别为1575.41和1227.60兆赫)传输信号。每个频率的测距码调制被称为伪随机噪声(PRN)序列或精确测距码。
单GPS接收器的精度约为5至30米。接收器必须确定卫星的位置,以便使用导航信息将距离测量值转换为用户的位置和速度。导航信息与PRN代码一起叠加在LI和L2载波上。该消息是二进制编码数据,包括关于卫星状态、星历(其位置和速度)、时钟偏差参数等信息。
美国政府正在不断提高GPS服务的性能,三个新的信号称为L2C, L5和LIC正在被引入民用。
3. GPS误差源
GPS接收器使用三边测量原理,通过对至少四颗卫星进行距离测量来计算其位置。这些测距测量受到来自各种来源的误差的干扰。
3.1 卫星时钟误差
随着时间的推移,卫星时钟会偏离GPS系统的时间。
控制端根据监测站提供的卫星时钟数据观测数据,估算出卫星时钟的校正参数,并上传到卫星;卫星再将这些参数广播到导航信息中,使接收机在计算测量距离时对卫星时钟误差进行校正。
3.2 接收机时钟误差
为降低成本,接收机时钟比卫星时钟精度低得多,并带有偏差。
在使用三个卫星伪距估计当前位置时,如果可获得第四个卫星的伪距,那么接收机的时钟误差可进行同步估计,通常采用一个Kalman滤波器来实现。
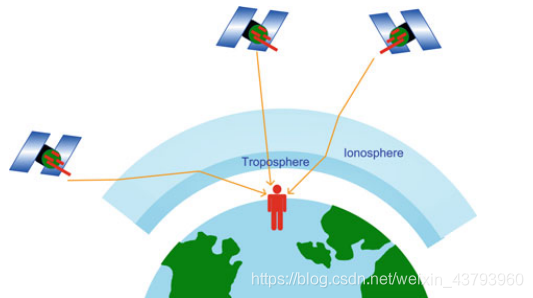
3.3 电离层延时
电离层作为大气层的一部分,其中包含电离气体(自由电子和离子),并占据地球表面约60至1000公里处的空间。这一层的电离水平随太阳活动而改变,影响电离层各层的折射率,从而改变GPS信号的传播时间
同时,卫星的高程也增加该误差的可变性,因为来自较低高程卫星的信号通过电离层的距离比来自较高高程卫星的信号更大。
伪距和载波相位的电离层延迟相等,但符号相反

其中f为载频,TEC为总电子数。TEC定义为沿电离层传输路径的1 m2横截面管中电子的数量,它在时间和空间上都是变化的。
同时配备了L1和L2的双频GPS接收机能够更准确地计算电离层延迟。
3.4 对流层延时*
对流层是地球表面8至40公里的大气部分,主要由干燥气体(N2和O2)和水蒸气组成。与电离层不同,对流层是电中性的,对于GPS频率来说是不分散的。但是由于存在折射,因此信号的传播速率相对于光速会衰减。L1和L2载波的对流层误差相同。
对流层延迟有干延迟和湿延迟之分。湿分量占对流层延迟的10%,由于水汽含量在局部范围内变化,因此很难建模。干分量模型更完善,占对流层延迟的90%。对流层延迟模型包括Saastamoinen模型、Hopfield模型和Chao模型。
3.5 多路径误差
多路径误差是城市环境中GPS信号的主要误差来源,GPS信号经过高楼建筑等物体表面,经过反射后到达接收机。间接到达的信号被延迟,并且信噪比很低。多路径误差可能导致位置误差超过10米。
载波相位测量的多径误差比伪距测量的误差低两个数量级。
3.6 卫星轨道误差
卫星在空间中的实际位置与接收机通过星厉数据计算的卫星位置之间的误差
控制端根据卫星先前的运动和地球引力来预测卫星轨道误差,并将该误差上传到卫星,作为星历数据广播给用户。因为星历模型是一条拟合实测轨道的曲线,它还包括相对于实际轨道的时变剩余误差。通常这个误差在2到5米之间。
3.7 接收机噪声
GPS接收机的随机测量噪声。
它是由天线电路、电缆、热噪声、射频信号干扰、信号量化和采样的累积效应引起的。
3.8 用户等效距离误差
在使用一些误差模型对测量值进行处理后,还存在一些剩余误差;将伪距测量的剩余误差结合起来,称为用户等效距离误差(UERE)。假设误差源可以分配到单个卫星伪距的,则这些误差是不相关的,那么一个卫星的综合UERE近似为一个零均值高斯随机变量:

4. GPS的增强
目前,一个独立GPS典型精度为:水平约为10米,垂直约为15米。这对于许多常用导航应用程序来说已经可以满足需求,但是对于一些重点应用项目来说还需要更高的精度,为了实现这一目标,需要使用各种其他系统来增强GPS。
为了达到更高精度的要求,可通各种增强系统:
- 增加额外的传感器: 该方法使用额外的传感器来补充GPS信息,提高整体的导航信息;例如:高度计、指南针、加速计、陀螺仪和里程计。
- 差分GPS的使用: 对于相对距离较近的用户来说GPS误差是相似的,这些误差被认为是空间和时间相关的。它们可以由一个位置已知的接收器来估计(基站/参考站)。估计的误差通过补偿算法传递给附近的GPS用户使用。这种技术被称为伪卫星差分GPS (DGPS),
- 辅助GPS: GPS越来越多地被整合到手机中,手机需要额外的信息来及时提供位置信息。可以通过蜂窝网络辅助GPS (A-GPS)

















 1404
1404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









