







基本PID原理介绍及代码实现
PID是自动化领域最常用的控制算法,经过多年的发展,拥有多种变种PID算法,如增量PID、积分分离PID、抗饱和PID、低通滤波PID等,变种PID都是为了解决常用PID存在的一些缺点,是PID的控制性能更好。本文不详细介绍所有的PID,而是以基本PID为例,介绍PID的原理及代码实现。
PID算法基本原理
模拟信号PID控制
如下图所示,PID控制就是将期望量与输出量的差值,采用比例、积分、微分求和,作为控制量输入到被被控系统,实现对期望量的跟踪。

PID控制器是一种线性控制器,它根据给定值yd(t)与实际输出值y(t)构成控制偏差

PID的控制规律为
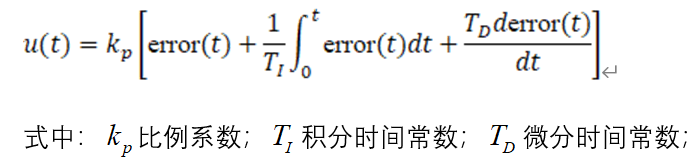
采用传递函数的形式,可以获得

PID对应环的作用:
(1) 比例环节:成比例地反映控制系统的偏差信号,减少偏差;
(2) 积分环节:主要是消除静差,提高系统的无误差度;
(3) 微分环节:反映偏差信号的变化趋势,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。
数字PID控制
数字PID常用位置形式和增量形式两种表达式:
- 位置式PID:
按模拟PID控制算法,以一系列的采样时刻kT代表连续时间t,采样周期为T,以矩形法数值积分近似替代积分,以一阶后向差分近似替代微分,即

- 增量式PID:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









