






基本的一些知识点:
home position:机器人准备开始工作时的位置。In the Home position, the robot is awaiting commands from a control device.
retracted position:机器人结束任务不再使用时应处的位置。In the Retracted position, the robot is in standby mode; control device features are disabled and power consumption is much lower.
大的控制模式有笛卡尔模式和Angular模式两种。
默认的控制模式是笛卡尔模式,即控制末端在笛卡尔坐标系下运动。【想切换成Angular模式,需要通过Kinova Development Center software 或者 Kinova API激活】
笛卡尔模式下又有两种模式:3-Axis和2-Axis。默认是3-Axis。要想切换,需要在启动后,按住ON-OFF键两秒以上。
3-Axis和2-Axis又各有下图所示的控制模式,都有相应的状态灯表示。
(不过有些好像控制起来没反应)
最常用的应该是:translation和wrist ,平移和旋转。
【模式切换在操作步骤中会介绍】

手柄按键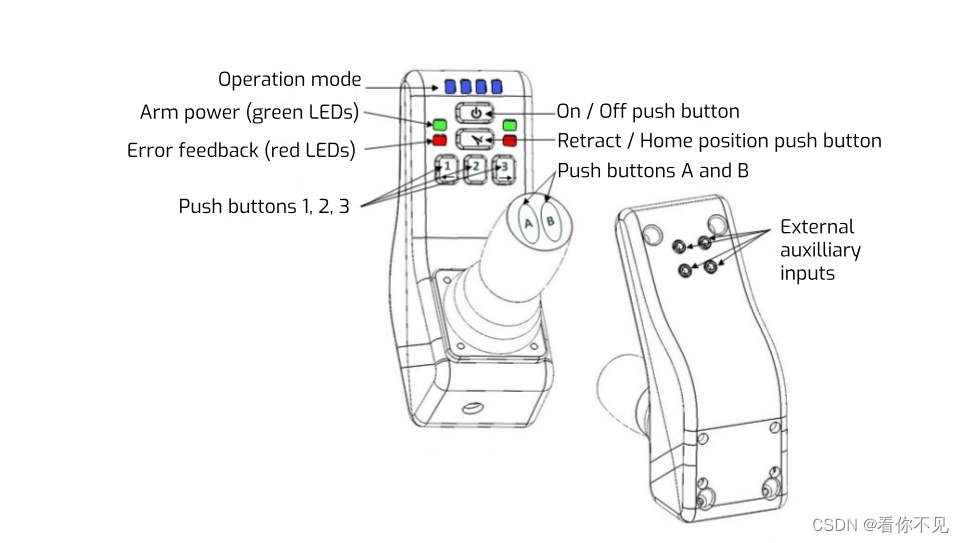 操作步骤:
操作步骤:
0. 机器人供电
1. 打开手柄(按On/Off push button)【手柄上看不出开没开,没开的话所有其他按键都是没用的,所以可以根据其他按键是否起作用判断手柄是否打开】
2. 等状态灯不闪且绿(Arm power)
3. 让机器人回到home position。操作方法:按住Retract/Home position push button,直到机器人停止运动。(会慢慢动过去)
4. 到达home position后,默认会进入3-Axis中的Translation模式,即只有最左边的蓝色灯亮。【如果灯都不亮,说明还没有到位,继续按】
5. 按一下B按键,进入wrist模式。再按一下B按键,退出wrist模式。
6. 操作完了之后,让机器人回到retracted position,同样是长按Retract/Home position push button,直到机器人停止运动。此时上面的蓝色状态灯会全部熄掉。
【机器人的运动只有手柄控制,所以其他按键可以大胆按,大胆试】















 1368
1368











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









