







jetson nano 控制舵机云台
文章目录
前言
Jetson nano
一、查看Jetson 的引脚状态
- 打开 Jetson-IO 工具
在终端输入以下命令打开 Jetson-IO 工具:
sudo /opt/nvidia/jetson-io/jetson-io.py
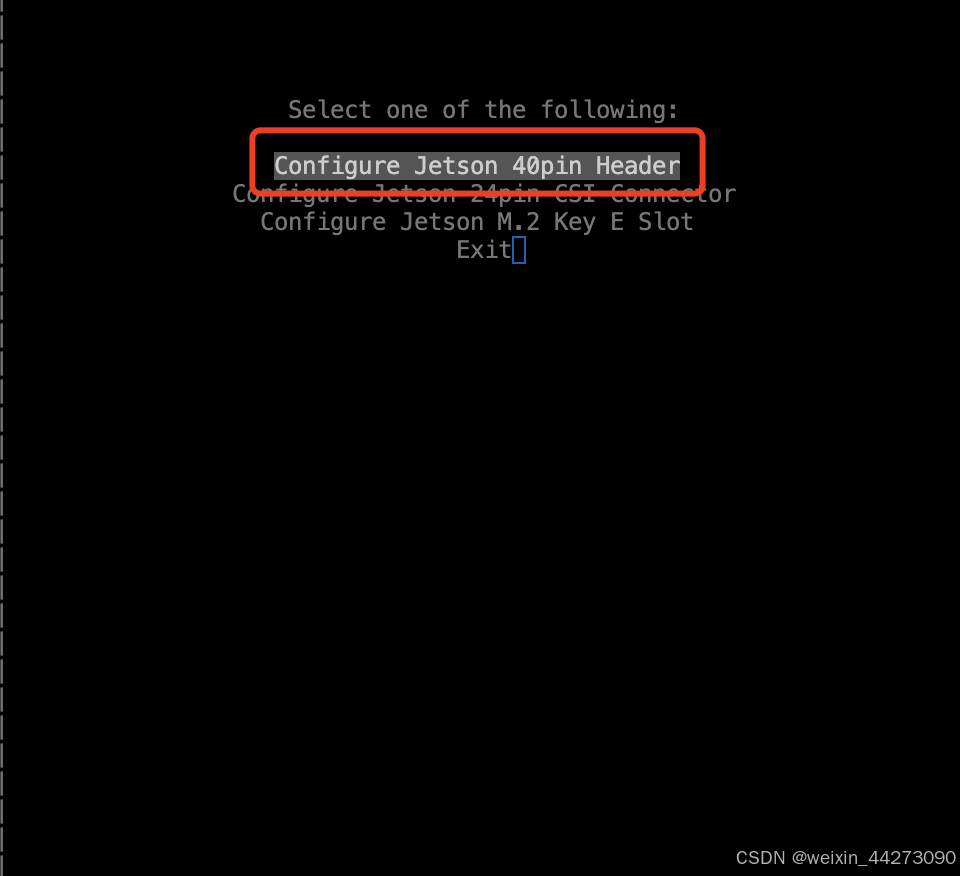
按enter进入,看到如下界面
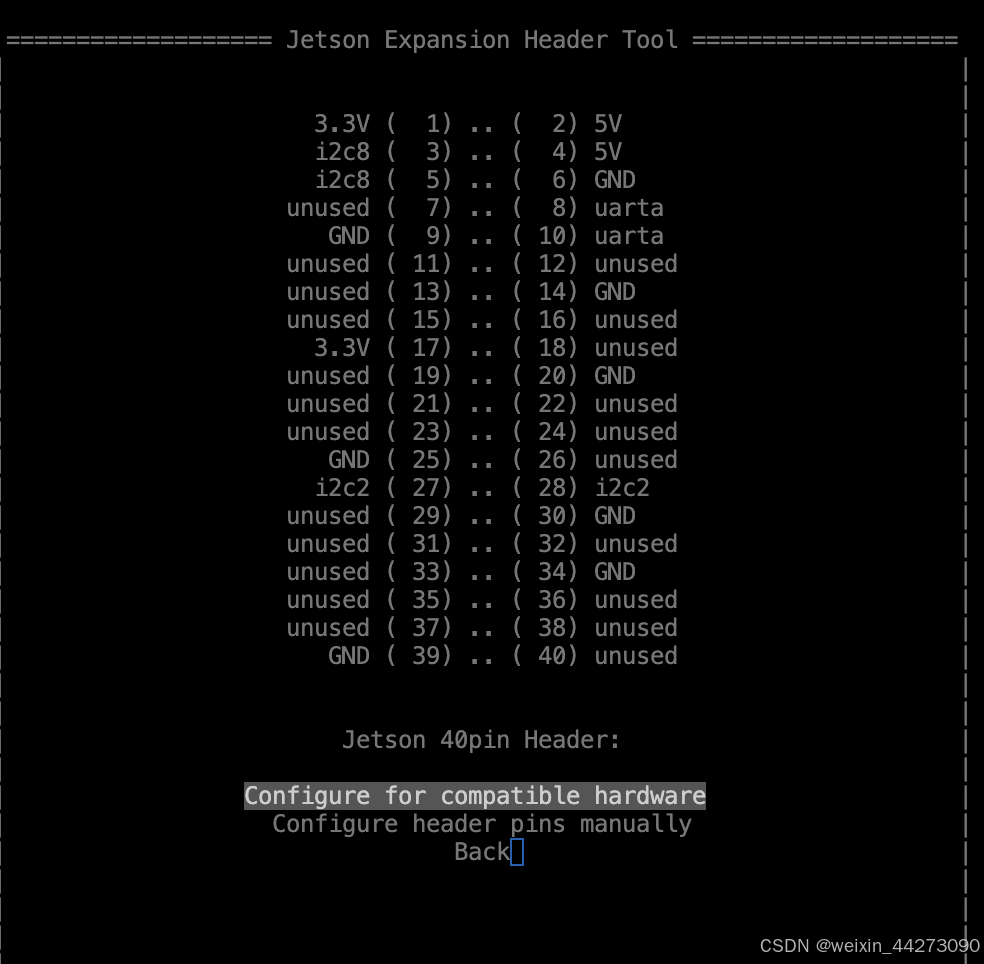
Jetson 的引脚目前大部分状态是 unused(未配置)。这表明这些引脚尚未被配置为特定功能(例如 PWM、UART 或 GPIO),需要通过 Jetson-IO 工具 手动配置引脚功能。
1、配置 Jetson 的引脚为 PWM 功能并输出 PWM 信号
- 打开 Jetson-IO 工具
在终端输入以下命令打开 Jetson-IO 工具:
sudo /opt/nvidia/jetson-io/jetson-io.py
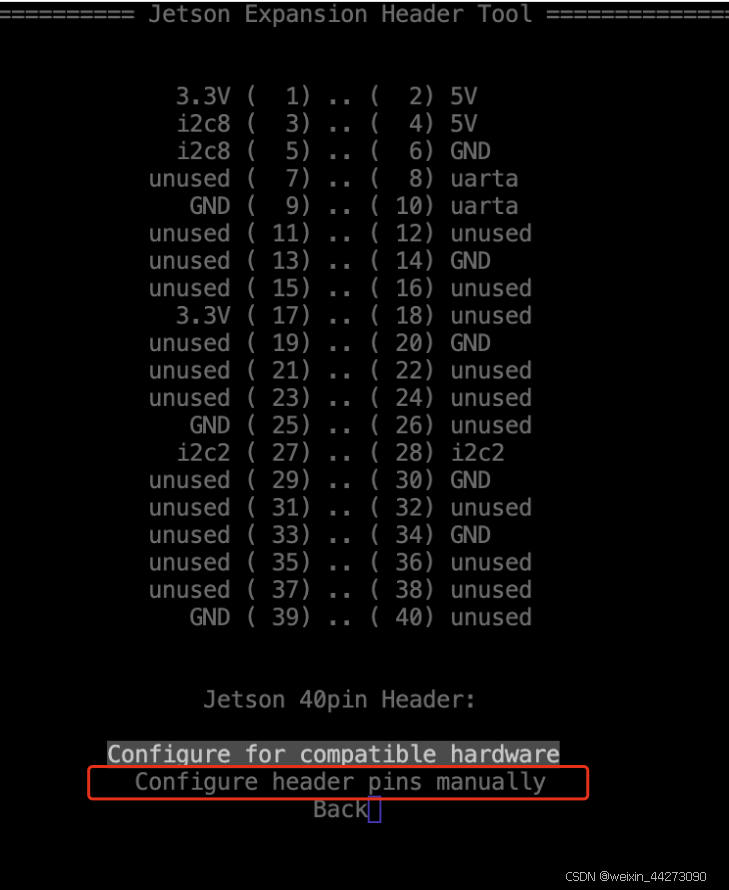
进入 Jetson-IO 工具后,选择 Configure header pins manually。
在手动配置界面,选择目标引脚(例如 Pin 32 和 Pin 33)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 981
981

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









