







(二十一)欧几里得聚类分割
算法步骤
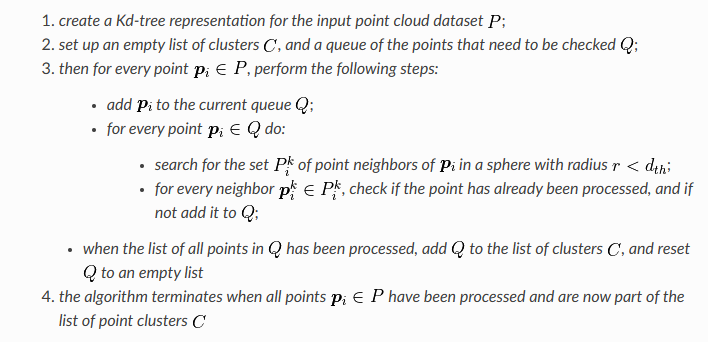
注: 根据源码,“processed”指的是这个点已经进行了求邻点操作或者作为其他点的邻点被添加进Q。另外,第三行中,如果
p
i
p_i
pi已经被处理了,则会跳过。
源码:
//
template <typename PointT> void
pcl::extractEuclideanClusters (const PointCloud<PointT> &cloud,
const typename search::Search<PointT>::Ptr &tree,
float tolerance, std::vector<PointIndices> &clusters,
unsigned int min_pts_per_cluster,
unsigned int max_pts_per_cluster)
{
if (tree->getInputCloud ()->size () != cloud.size ())
{
PCL_ERROR("[pcl::extractEuclideanClusters] Tree built for a different point cloud "
"dataset (%zu) than the input cloud (%zu)!\n",
static_cast<std::size_t>(tree->getInputCloud()->size()),
static_cast<std::size_t>(cloud.size()));
return;
}
// Check if the tree is sorted -- if it is we don't need to check the first element
int nn_start_idx = tree->getSortedResults () ? 1 : 0;
// Create a bool vector of processed point indices, and initialize it to false
std::vector<bool> processed (cloud.size (), false);
Indices nn_indices;
std::vector<float> nn_distances;
// Process all points in the indices vector
for (int i = 0; i < static_cast<int> (cloud.size ()); ++i)
{
if (processed[i])
continue;
Indices seed_queue;
int sq_idx = 0;
seed_queue.push_back (i);
processed[i] = true;
while (sq_idx < static_cast<int> (seed_queue.size ()))
{
// Search for sq_idx
if (!tree->radiusSearch (seed_queue[sq_idx], tolerance, nn_indices, nn_distances))
{
sq_idx++;
continue;
}
for (std::size_t j = nn_start_idx; j < nn_indices.size (); ++j) // can't assume sorted (default isn't!)
{
if (nn_indices[j] == UNAVAILABLE || processed[nn_indices[j]]) // Has this point been processed before ?
continue;
// Perform a simple Euclidean clustering
seed_queue.push_back (nn_indices[j]);
processed[nn_indices[j]] = true;
}
sq_idx++;
}
// If this queue is satisfactory, add to the clusters
if (seed_queue.size () >= min_pts_per_cluster && seed_queue.size () <= max_pts_per_cluster)
{
pcl::PointIndices r;
r.indices.resize (seed_queue.size ());
for (std::size_t j = 0; j < seed_queue.size (); ++j)
r.indices[j] = seed_queue[j];
// After clustering, indices are out of order, so sort them
std::sort (r.indices.begin (), r.indices.end ());
r.header = cloud.header;
clusters.push_back (r); // We could avoid a copy by working directly in the vector
}
else
{
PCL_DEBUG("[pcl::extractEuclideanClusters] This cluster has %zu points, which is not between %u and %u points, so it is not a final cluster\n",
seed_queue.size (), min_pts_per_cluster, max_pts_per_cluster);
}
}
}
cluster_extraction.cpp
#include <pcl/ModelCoefficients.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/search/kdtree.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_clusters.h>
#include <iomanip> // for setw, setfill
int main ()
{
// Read in the cloud data
pcl::PCDReader reader;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>), cloud_f (new pcl::PointCloud<pcl::PointXYZ>);
reader.read ("table_scene_lms400.pcd", *cloud);
std::cout << "PointCloud before filtering has: " << cloud->size () << " data points." << std::endl; //*
// Create the filtering object: downsample the dataset using a leaf size of 1cm
pcl::VoxelGrid<pcl::PointXYZ> vg;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
vg.setInputCloud (cloud);
vg.setLeafSize (0.01f, 0.01f, 0.01f);
vg.filter (*cloud_filtered);
std::cout << "PointCloud after filtering has: " << cloud_filtered->size () << " data points." << std::endl; //*
// 使用平面分割模型去掉 点云中的平面
pcl::SACSegmentation<pcl::PointXYZ> seg;
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane (new pcl::PointCloud<pcl::PointXYZ> ());
pcl::PCDWriter writer;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setMaxIterations (100);
seg.setDistanceThreshold (0.02);
int nr_points = (int) cloud_filtered->size ();
while (cloud_filtered->size () > 0.3 * nr_points)
{
// Segment the largest planar component from the remaining cloud
seg.setInputCloud (cloud_filtered);
seg.segment (*inliers, *coefficients);
if (inliers->indices.size () == 0)
{
std::cout << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
// Extract the planar inliers from the input cloud
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud (cloud_filtered);
extract.setIndices (inliers);
extract.setNegative (false);
// Get the points associated with the planar surface
extract.filter (*cloud_plane);
std::cout << "PointCloud representing the planar component: " << cloud_plane->size () << " data points." << std::endl;
// Remove the planar inliers, extract the rest
extract.setNegative (true);
extract.filter (*cloud_f);
*cloud_filtered = *cloud_f;
}
// Creating the KdTree object for the search method of the extraction
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud (cloud_filtered);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec;
// 每个点的邻域半径。如果取一个非常小的值,则可能会将实际对象视为多个簇。另一方面,如果将该值设置得过高,则可能会将多个对象视为一个簇。
ec.setClusterTolerance (0.02); // 2cm
ec.setMinClusterSize (100); // 聚类簇的最小点数
ec.setMaxClusterSize (25000); // 聚类簇的最大点数
ec.setSearchMethod (tree);
ec.setInputCloud (cloud_filtered);
ec.extract (cluster_indices);
int j = 0;
for (const auto& cluster : cluster_indices) // 每个聚类簇
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster (new pcl::PointCloud<pcl::PointXYZ>);
for (const auto& idx : cluster.indices) { // 聚类簇中每个点的索引
cloud_cluster->push_back((*cloud_filtered)[idx]);
} //*
cloud_cluster->width = cloud_cluster->size ();
cloud_cluster->height = 1;
cloud_cluster->is_dense = true;
std::cout << "PointCloud representing the Cluster: " << cloud_cluster->size () << " data points." << std::endl;
std::stringstream ss;
ss << std::setw(4) << std::setfill('0') << j;
writer.write<pcl::PointXYZ> ("cloud_cluster_" + ss.str () + ".pcd", *cloud_cluster, false); //*
j++;
}
return (0);
}
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(cluster_extraction)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (cluster_extraction cluster_extraction.cpp)
target_link_libraries (cluster_extraction ${PCL_LIBRARIES})
$ ./cluster_extraction


















 650
650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











