







 本文深入探讨了内模原理(IMP)在控制系统设计中的应用,通过两个实例详细讲解了如何设计控制器以实现稳定的闭环系统,并确保跟踪信号的准确性。
本文深入探讨了内模原理(IMP)在控制系统设计中的应用,通过两个实例详细讲解了如何设计控制器以实现稳定的闭环系统,并确保跟踪信号的准确性。
内模原理(The Internal Mode Principle,IMP)
在这份讲义中,我们将熟悉内模原理的概念。“内模原理在调节器问题中起到至关重要的作用。内模原理可以直观地表达为:任何一个好的调节器都必须在闭环系统中构造一个环境动态结构的模型”。
接下来,我们考虑图1中的闭环系统的结构框图。利用框图基本方法可以得到
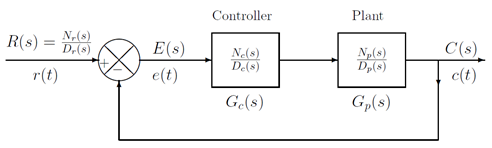
(图1)
E
(
s
)
=
R
(
s
)
−
G
p
(
s
)
G
c
(
s
)
E
(
s
)
=
1
1
+
G
p
(
s
)
G
c
(
s
)
R
(
s
)
\begin{aligned} E(s) &=R(s)-G_{p}(s) G_{c}(s) E(s) \\ &=\frac{1}{1+G_{p}(s) G_{c}(s)} R(s) \end{aligned}
E(s)=R(s)−Gp(s)Gc(s)E(s)=1+Gp(s)Gc(s)1R(s)
简单变换之后,可以得到
E
(
s
)
=
D
p
(
s
)
D
c
(
s
)
D
p
(
s
)
D
c
(
s
)
+
N
p
(
s
)
N
c
(
s
)
N
r
(
s
)
D
r
(
s
)
E(s)=\frac{D_{p}(s) D_{c}(s)}{D_{p}(s) D_{c}(s)+N_{p}(s) N_{c}(s)} \frac{N_{r}(s)}{D_{r}(s)}
E(s)=Dp(s)Dc(s)+Np(s)Nc(s)Dp(s)Dc(s)Dr(s)Nr(s)
我们的目标是,设计一个控制器
G
c
(
s
)
=
N
c
(
s
)
D
c
(
s
)
G_{c}(s)=\frac{N_{c}(s)}{D_{c}(s)}
Gc(s)=Dc(s)Nc(s)使得
lim
t
→
∞
e
(
t
)
=
lim
t
→
∞
(
r
(
t
)
−
c
(
t
)
)
=
0
\lim _{t \rightarrow \infty} e(t)=\lim _{t \rightarrow \infty}(r(t)-c(t))=0
t→∞lime(t)=t→∞lim(r(t)−c(t))=0
其中,
e
(
t
)
e(t)
e(t)是
e
(
s
)
e(s)
e(s)的拉普拉斯逆变换。
假设参考信号
r
(
t
)
r(t)
r(t)的拉普拉斯变换极点在右半平面上,即它们属于集合
{
s
:
ℜ
(
s
)
≥
0
}
\{s: \Re(s) \geq 0\}
{s:ℜ(s)≥0}。那么多项式
P
c
(
s
)
=
D
p
(
s
)
D
c
(
s
)
+
N
p
(
s
)
N
c
(
s
)
P_{c}(s)=D_{p}(s) D_{c}(s)+N_{p}(s) N_{c}(s)
Pc(s)=Dp(s)Dc(s)+Np(s)Nc(s)
是图1中闭环系统的闭环特征多项式,闭环特征多项式零点就是闭环系统的极点。
下面的结论就是所谓的“内模原理:”:
在图1所示的构型中, R ( s ) R(s) R(s)的极点是在右半平面,那么 lim t → ∞ e ( t ) = 0 \lim _{t \rightarrow \infty} e(t)=0 t→∞lime(t)=0的充要条件是:
- 闭环极点位于开左半平面;
- 我们把 D r ( s ) D_{r}(s) Dr(s)叫做开环多项式 D p ( s ) D c ( s ) D_{p}(s) D_{c}(s) Dp(s)Dc(s)的因子,也就是说,存在一个多项式 Q ( s ) Q(s) Q(s),使得 D p ( s ) D c ( s ) = Q ( s ) D r ( s ) D_{p}(s) D_{c}(s)=Q(s) D_{r}(s) Dp(s)Dc(s)=Q(s)Dr(s)。
IMP的第二个条件是指,跟踪控制器的选择必须使开环传递函数 G p ( s ) G c ( s ) G_{p}(s) G_{c}(s) Gp(s)Gc(s)包含要跟踪的参考信号的模型。如果 R ( s ) R(s) R(s)的极点不是系统的传递函数 G p ( s ) G_{p}(s) Gp(s)的极点,那么我们可以将IMP重写为:
任何好的跟踪控制器都必须稳定闭环系统,并且必须包含参考信号的模型。
接下来举两个例子,以便更好地理解IMP。
Example 1
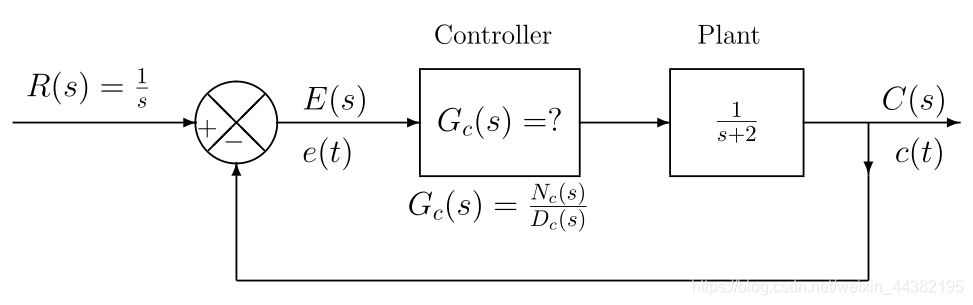
(图2)
对于图2所示的闭环系统,我们的目标是构造一个传递函数
G
c
(
s
)
G_{c}(s)
Gc(s),使
lim
t
→
∞
e
(
t
)
=
0
\lim _{t \rightarrow \infty} e(t)=0
limt→∞e(t)=0。误差的拉普拉斯变换是
E
(
s
)
=
1
1
+
1
s
+
2
N
c
(
s
)
D
c
(
s
)
1
s
=
(
s
+
2
)
D
c
(
s
)
(
s
+
2
)
D
c
(
s
)
+
N
c
(
s
)
1
s
E(s)=\frac{1}{1+\frac{1}{s+2} \frac{N_{c}(s)}{D_{c}(s)}} \frac{1}{s}=\frac{(s+2) D_{c}(s)}{(s+2) D_{c}(s)+N_{c}(s)} \frac{1}{s}
E(s)=1+s+21Dc(s)Nc(s)1s1=(s+2)Dc(s)+Nc(s)(s+2)Dc(s)s1
令
N
c
(
s
)
=
1
N_{c}(s)=1
Nc(s)=1和
D
c
(
s
)
=
s
D_{c}(s)=s
Dc(s)=s,也就是说
G
c
(
s
)
=
1
s
G_{c}(s)=\frac{1}{s}
Gc(s)=s1
则可以得到
E
(
s
)
=
(
s
+
2
)
s
s
2
+
2
s
+
1
1
s
=
s
+
2
s
2
+
2
s
+
1
E(s)=\frac{(s+2) s}{s^{2}+2 s+1} \frac{1}{s}=\frac{s+2}{s^{2}+2 s+1}
E(s)=s2+2s+1(s+2)ss1=s2+2s+1s+2
很明显,这里的积分器控制器可以实现
lim
t
→
∞
e
(
t
)
=
0
\lim _{t \rightarrow \infty} e(t)=0
limt→∞e(t)=0。
Example 2
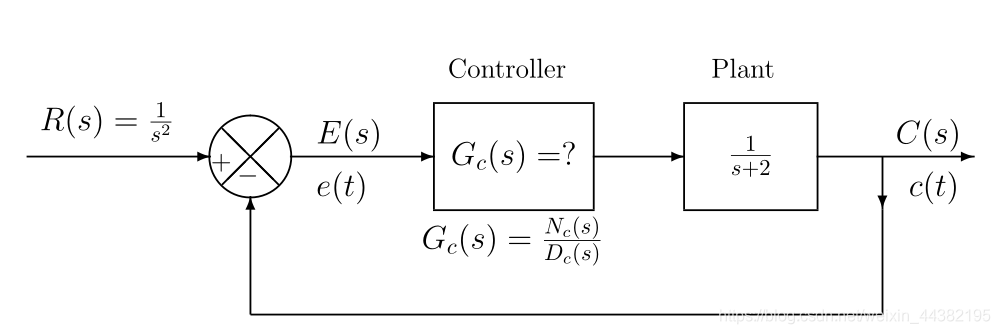
(图3)
图2中把输入信号改为斜坡信号,那么误差信号的拉普拉斯变换为
E
(
s
)
=
1
1
+
1
s
+
2
N
c
(
s
)
D
c
(
s
)
1
s
2
=
(
s
+
2
)
D
c
(
s
)
(
s
+
2
)
D
c
(
s
)
+
N
c
(
s
)
1
s
2
=
s
+
2
s
2
+
2
s
+
1
1
s
\begin{aligned} E(s) &=\frac{1}{1+\frac{1}{s+2} \frac{N_{c}(s)}{D_{c}(s)}} \frac{1}{s^{2}} \\ &=\frac{(s+2) D_{c}(s)}{(s+2) D_{c}(s)+N_{c}(s)} \frac{1}{s^{2}} \\ &=\frac{s+2}{s^{2}+2 s+1} \frac{1}{s} \end{aligned}
E(s)=1+s+21Dc(s)Nc(s)1s21=(s+2)Dc(s)+Nc(s)(s+2)Dc(s)s21=s2+2s+1s+2s1
可以得到 e ( ∞ ) = 2 e(\infty)=2 e(∞)=2,因此一个积分器是不够的,注意到 D r ( s ) D_{r}(s) Dr(s)不是 D c ( s ) D_{c}(s) Dc(s)的因子,然后我们尝试一个控制器,满足IMP的可整除性,如果我们取二重积器,那么满足可整除性条件,我们得到 E ( s ) = s + 2 s 3 + 2 s 2 + 1 E(s)=\frac{s+2}{s^{3}+2 s^{2}+1} E(s)=s3+2s2+1s+2
然而,可以看到右半平面的极点使得系统不再稳定,也就是第一个条件不再满足。
译自:https://engineering.purdue.edu/~zak/ECE_382-Fall_2018/hand_3.pdf



















 684
684

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











