






数学模型
其中:
----------------k时刻的状态向量
-----------------k时刻的观测向量
-----------------状态转移矩阵
---------------观测矩阵
---------------状态噪声(均值为0,方差为R(k))
--------------观测噪声(均值为0,方差为Q(k))
原理:
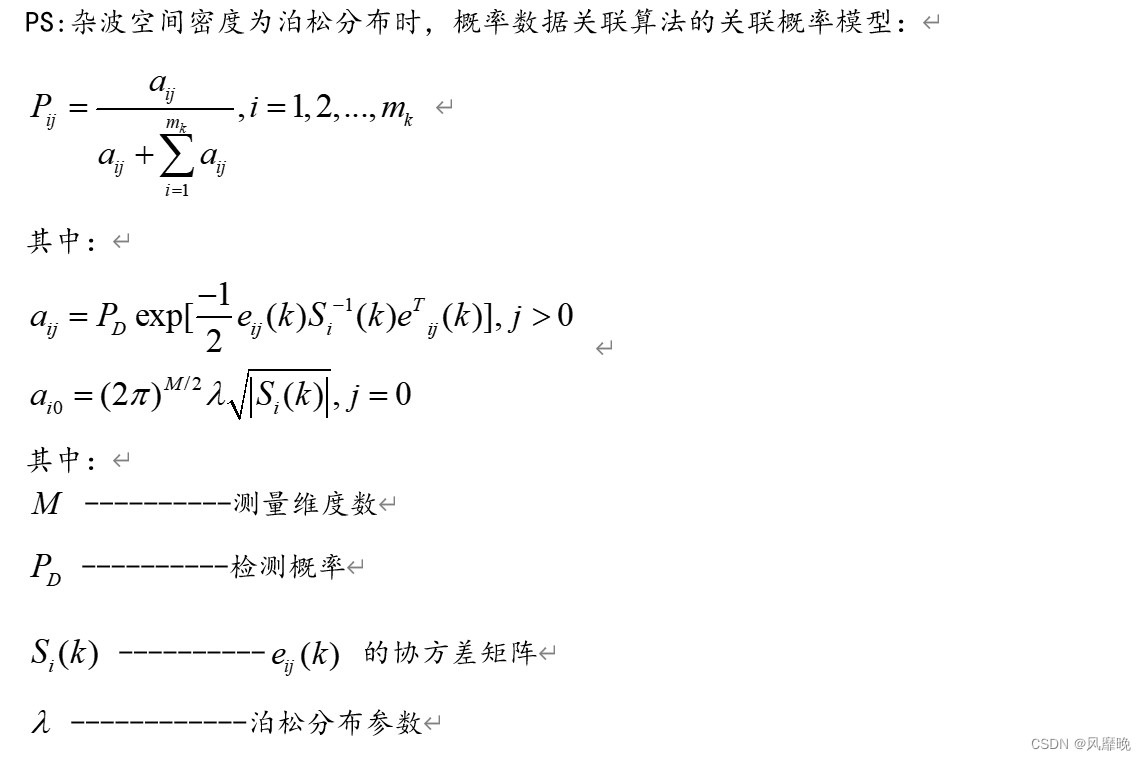
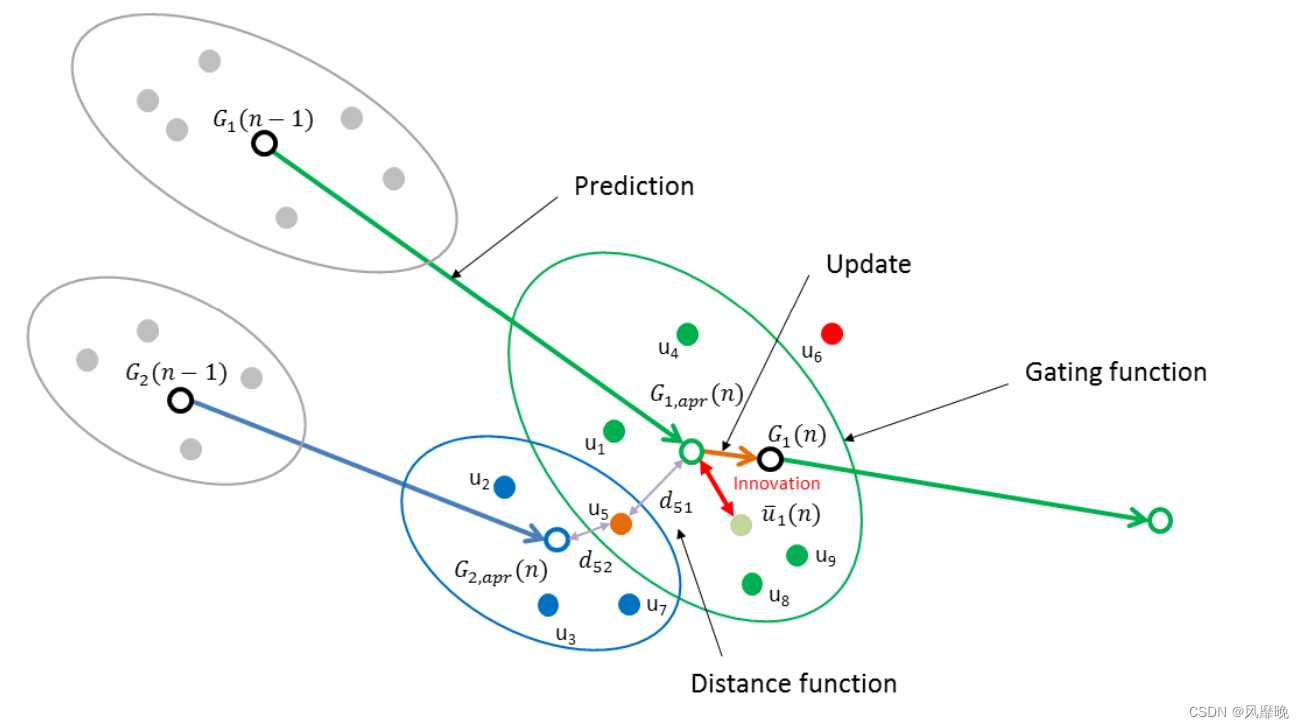
之前提到的最近邻算法是假定波门内只有一个点迹是有效回波。而PDA算法假定:只有是有效回波(存在波门内),就都有可能来自目标,只是每个点迹来自目标的概率不同而已。这种算法根据大量计算给出了各概率加权系数及其加权和,然后用加权之后的新点迹用于目标更新。
步骤:
特点:计算量和标准卡尔曼滤波几乎相等,易于实现。但仍然适用于单目标跟踪或稀疏环境下,且目标航迹已经形成的基础上。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









