







概述
前几天安装了一下Ubuntu双系统,现在记录一下,主要是把查看过的网页教程总结一下,这样安装绝对不会错,前几天安装了两次,都很顺利一次性通过。
步骤
双系统坑点总结
双系统教程看这个博主的就行。

还是挺详细的,从制作启动盘到安装系统。
但是分区部分的感觉他有点没说清楚,分区部分可以看这个博主的表格。

如果要跑大型仿真模型等操作,一定要注意的是把根目录“ / ”的分区分大点,我一开始只分了20G,没多久就满了,之后扩容,导致系统进不去,无奈重装,硬盘大的直接分100G起步。
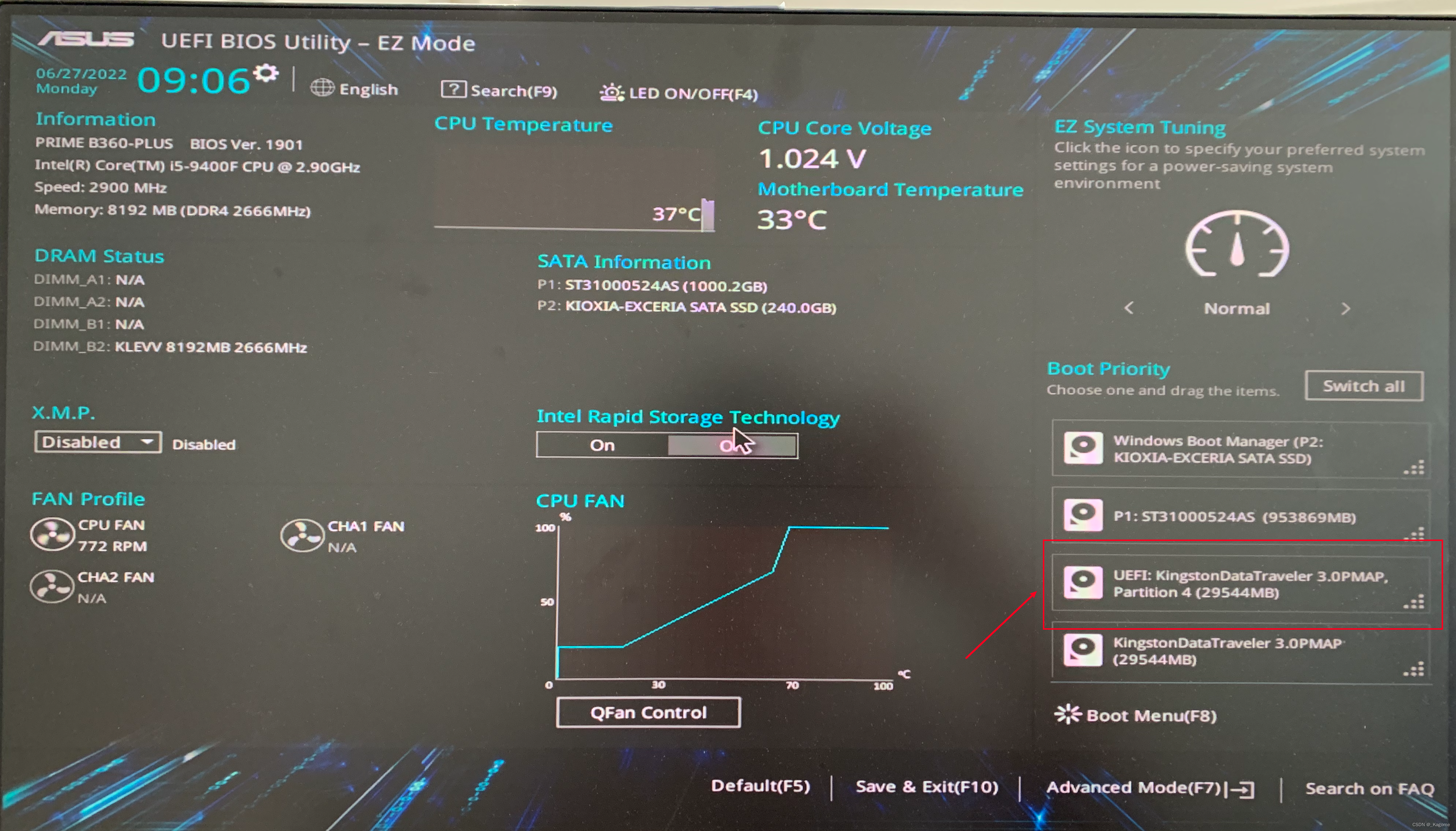
还有一个需要注意的是,分区有一个EFI系统分区,你应该从BIOS当中选择启动盘UEFI选项进去安装系统,不然分区的时候找不到EFI系统分区这个选项。
华硕主板的在这选择。
常规设置
进入双系统之后有些常规设置,第一是软件源设置,第二是显卡设置。

软件源这样选择,都勾选上,我这里是用的清华源。
之后就是显卡设置,看这个博主的显卡设置就行。

直接在软件源当中选附加驱动,选择tested专有版本就行。
ROS+PX4+MavRos安装
在这之前先把PIP安装好,后续要用。
sudo apt install python-pip #安装pip2
python2 -m pip install -U pip #更新pip2
sudo apt install python3-pip #安装pip3
pip3 install --upgrade pip #更新pip3
安装好pip后,看这一篇ROS安装教程跟着来就行,这位老哥总结的很到位,一步成功。

其中有几步我小卡了一下,一个是在rosdep init,文章里的ip好像用不了了,我是用这个方法解决的。

大家有条件的一定要挂梯子,在万能的某宝花两块钱买一个clash梯子就行,有梯子后基本上不会卡着什么。
另一个卡的是rosdep update这个,不过挂梯子之后就没卡过了,不挂梯子一次成功的办法可以看这篇Blog一定能解决。

之后没啥大问题,PX4和MavRos都正常安装就行。
XTDrone安装
看肖老师的文档就行,一次通过。
总结
踩坑的地方我都说了,希望大家都能一次安装通过!
















 1712
1712

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









