







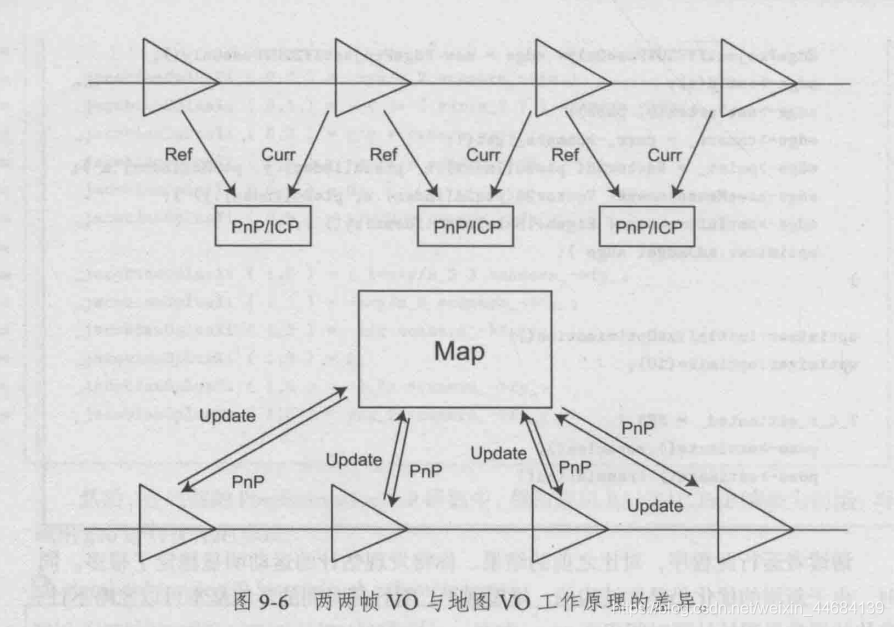
地图VO
之前计算位姿的方法是,两两帧间运用特征匹配,PnP方法计算位姿并用g2o进行单元边的3d-2d的优化。
虽说用g2o优化已经能够避免一部分噪声对RANSAC的PnP的影响。
但是,如果存在帧丢失的情况,可能距离比较远的两帧进行特征匹配和PnP求解的话可能匹配上的点比较少。因此位姿计算可能不够精确。并最终会出现追踪丢失Lost状态。
此外,全用两帧间计算的话误差累计漂移是个很严重的问题,
因此我们加入局部地图的概念(local mapping),每一帧都为VO维护的map_中提供新的地图点(携带着自身的描述子),计算位姿时通过2d关键点与3d携带描述子的地图点进行匹配,然后再进行3d-2d的PnP方法,能够在一定程度上解决VO的LOST问题。
由于地图点的坐标直接采用世界坐标,因此我们可以直接求出当前帧在世界坐标系中的位姿Tcw,而不是Tcf (或者说而不是Tij)
这样就讲得通了,为什么说位姿图中,误差项为Tij^(-1) * Ti * Tj,Ti和Tj是前端的结果,Tij是用特征点法或者直接法或者IMU或者GPS得到的。终于明白了!!!!!!!!
下面着重考虑局部地图 local mapping的VO,被称为——地图VO
这里的局部地图和slam的建图不一样,暂时还没有考虑全局地图。这里只是局部地图,简单的把一些比较近的、视野内的特征点缓存到一个地方,是一个小地图。而slam建图过程中的全局地图却储存了所有的特征点。但是直接在全局上定位,计算量很大(全局地图主要用于回环检测和地图表达)。因此在这里我们维护一个小的局部地图,从而实现通过小地图(局部地图)进行定位当前位姿。
是否使用局部地图,是出于对效率和精度这一矛盾体的仔细考量:

根据看代码,有下面几点发现:
(1)addKeyFrame,增加关键帧的时候,提供了一个功能:
因为我们让第一帧成为了关键帧,所以加入第一帧的时候,把第一帧的特征点加入到地图中,在普通VO也确实是这么做的,但是是根据setRef3DPoints这个单独的函数做的。这里是把功能集成到addKeyFrame中。
(2)Mat竟然也有尾插,这是很让人兴奋的:
desp_map.push_back( p->descriptor_ ); // 插上一行能观察到的地图点的描述子
(3)直接与地图匹配,是地图VO的特点,并且用了cv::FlannBasedMatcher matcher_flann_; 匹配器
matcher_flann_.match ( desp_map, descriptors_curr_, matches ); // flann matcher将嫩观测到的地图点与当前帧关键点进行匹配,注意,这里和普通VO是不一样的
(4)向地图中增加关键帧的机制是:当前帧的关键点一旦和地图点匹配上了,那么就无视他。没有匹配上的关键点需要映射到世界坐标系中,增加局部地图点的规模。具体看函数:void Map_VisualOdometry::addMapPoints()
(5)void Map_VisualOdometry::optimizeMap()这个函数实现了添加新点(嵌套着addMapPoints()),并且实现了控制局部地图的规模,控制手段如下:
(i)根据匹配率筛选:
匹配率 = 匹配上次数/观测到的次数
有些三维点被观测到了很多次(isInFrame),但是匹配上的次数很少,不知道原因为何,那既然匹配的少,就直接删掉吧。
(ii)根据视角删除点
angle = getViewAngle( curr_, iter->second );获得视角,这个点如果在当前帧视野中太偏,即处在边缘位置,那么就删掉。
(iii)当前帧与路标点的匹配少于100个,才加入地图,否则地图规模容易太大— 但我觉得问题不大,因为有下面这一步:
(iv)直接控制地图点规模,当地图点增加到1000个以上的时候,迭代增加门槛map_point_erase_ratio_,这样有更多匹配率比较低的点被删除,一直删到总地图点小于1000个。------这一块代码是我自己补充的。
后话
由于我一直在0.1上增删代码,没有直接用后面的0.2 0.3 0.4版本的代码,所以直接继承是一个好方法:
map_visual_odometry.h
继承部分如下。子类叫做:map_visual_odometry
#ifndef MAP_VISUALODOMETRY_H
#define MAP_VISUALODOMETRY_H
#include "visual_odometry.h"
// 在这里继承一下父类(VisualOdometry),实现地图VO
namespace myslam
{
class Map_VisualOdometry:public VisualOdometry // 继承一下,避免大量修改原始VO代码
{
public:
typedef shared_ptr<Map_VisualOdometry> Ptr;
附上优化地图的代码:(有我自己写的一点) Map_VisualOdometry::optimizeMap()
void Map_VisualOdometry::optimizeMap() // 加入新点,清理一波观测次数太少的、太边缘的点
{
// remove the hardly seen and no visible points
for ( auto iter = map_->map_points_.begin(); iter != map_->map_points_.end(); )
{
if ( !curr_->isInFrame(iter->second->pos_) ) // 位姿估计完毕以后,如果当前帧看不到的地图点,那么清除掉
{
iter = map_->map_points_.erase(iter);
continue;
}
float match_ratio = float(iter->second->matched_times_)/iter->second->visible_times_; // 这个点的,匹配上次数/可观测到的次数
if ( match_ratio < map_point_erase_ratio_ ) // map_point_erase_ratio_ = 0.1,为yaml读入
{
iter = map_->map_points_.erase(iter); // 在map_中去除这个点,因为这个点匹配率太低了,可以控制局部地图的规模
continue;
}
double angle = getViewAngle( curr_, iter->second );
if ( angle > M_PI/6. )
{
iter = map_->map_points_.erase(iter); // 太边缘的点也给擦掉
continue;
}
if ( iter->second->good_ == false )
{
// TODO try triangulate this map point
// 我觉得暂时不用——直接在上面3p-2p的g2o处同时优化位姿和对应的特征点即可
// 也就是用二元边,这个以后再加代码吧
}
iter++;
}
if ( match_2dkp_index_.size()<100 ) // 匹配上少于100个再加入地图,否则地图规模容易太大
addMapPoints(); // 在这里加入新的地图点
if ( map_->map_points_.size() > 1000 ) // 控制地图点规模,迭代增加门槛map_point_erase_ratio_
{
// TODO map is too large, remove some one
map_point_erase_ratio_ += 0.05;
while (map_->map_points_.size() > 1000)
{
Map_VisualOdometry::optimizeMap(); // 提高门槛,调用自己
}
}
else
map_point_erase_ratio_ = 0.1;
cout<<"map points: "<<map_->map_points_.size()<<endl;
}
至此前端完成。(普通VO + 地图VO的实现)
暂时还没有用到关键帧,仅仅是当前后两帧距离较远的时候插入关键帧。
关键帧主要是后端用的。
可以联系我获取完整的带注释的和有我自己补充的、适应各种新版本库(比如模板类sophus和新版本g2o)的代码。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









