







机器人操作课题涉及与环境中物体的复杂交互,而如何有效地表示这些交互中的约束是关键问题。斯坦福大学AI团队发表的论文“ReKep: Spatio - Temporal Reasoning of Relational Keypoint Constraints for Robotic Manipulation”的论文提出的创新方法,为机器人操作带来了新的突破。该方法将机器人操作任务表示为约束,通过关键点映射的方式实现。ReKep 可分解任务为多阶段约束,能自动从RGB-D的观察和语言指令中获取关键点和约束的信息,在轮式单臂和固定式双臂平台上进行实验。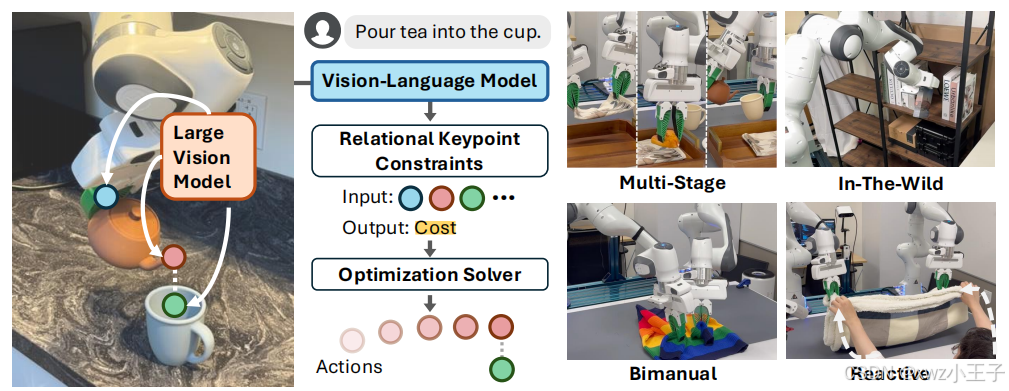
▲图1|Relational Keypoint Constraints (ReKep)©️传统的方法在处理多样性任务、自动化标注和实时优化等方面存在挑战。例如,使用相对姿势来表示约束的方法虽然直接且广泛使用,但刚性变换无法描绘几何细节,需要事先获取物体模型,且不能处理可变形物体。而数据驱动的方法虽然更灵活,但随着约束数量的增加,如何有效地收集训练数据是很大的难题。基于此,研究人员提出了一个问题:如何表示机器人操作中的约束,使其能够广泛应用于各种任务,具有可扩展性,并能够通过现成的求解器进行实时优化,以适应复杂的操作行为?为了解决上述问题,研究人员提出了Relational Keypoint Constraints(ReKep)。具体来说,ReKep将约束表示为Python函数,该函数将一组关键点映射到一个数值,其中每个关键点是场景中对应特定任务和语义、且有意义的3D点。每个函数由关键点上的(可能是非线性的)运算组成,编码了它们之间所需的“关系”,这些关键点可能属于环境中的机器人手臂、物体部件和其他主体。然而,一个操作任务通常涉及多个空间关系,并可能包含多个时间阶段,每个阶段都包含不同的空间关系。为了应对这一挑战,研究人员将任务分解为N个阶段,并使用ReKep为每个阶段i指定两种约束。以倒茶任务为例,该任务包括三个阶段:抓取、对齐和倾倒。阶段1的子目标约束会将末端执行器拉向茶壶手柄。然后,阶段2的子目标约束规定茶壶嘴需要在杯子开口的上方。此外,阶段2的路径约束会确保茶壶在运输过程中保持直立以避免溢出。最后,阶段3的子目标约束指定了所需的倾倒角度。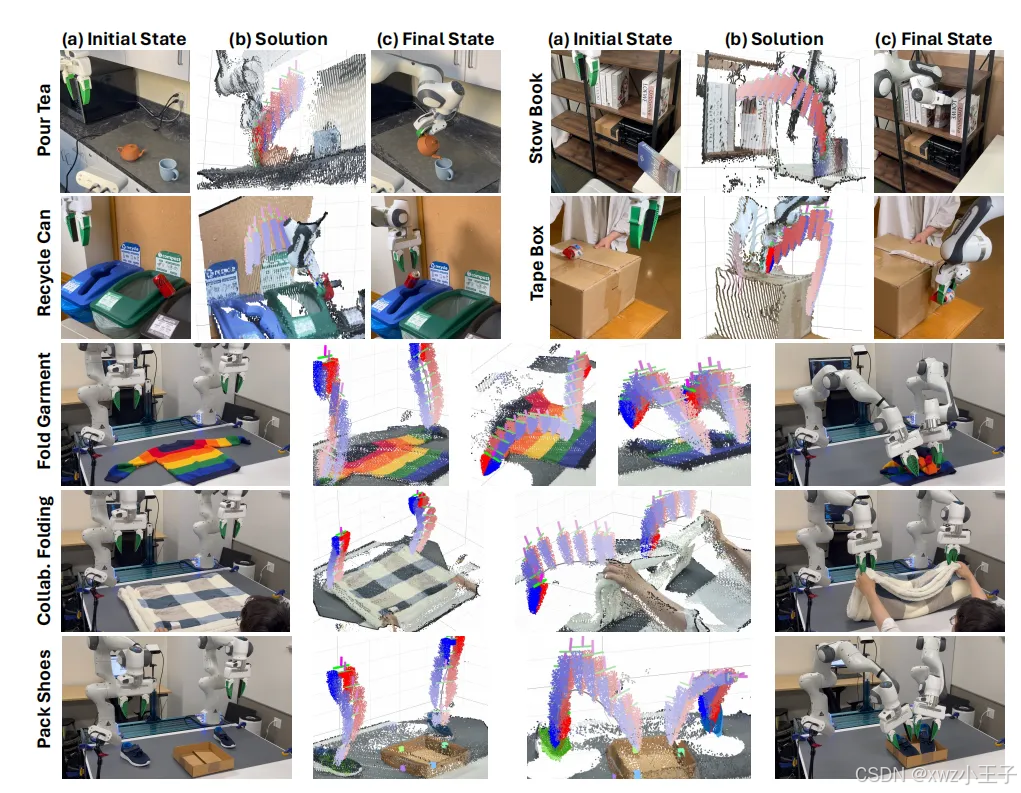
▲图2|实验任务和优化结果的视觉化展示©️【深蓝AI】编译■4.1 关键点选取
实验会给定一个RGB图像,再使用DINOv2提取补丁特征,并通过双线性插值将其采样到原始图像大小。然后,使用Segment Anything(SAM)提取场景中的所有标记。对于每个标记,研究人员使用PCA将特征投影到三个维度,并使用k-means聚类(k = 5)来获取聚类中心。这些中心将作为关键点的“候选“,研究人员会使用校准的RGB - D相机将其投影到世界坐标中。在”候选点“中,距离在8cm以内的点会被过滤掉,以确保识别出大部分粒度精细,且语义有意义的物体区域。■4.2 约束生成获得关键点候选后,研究人员将它们与数值标记一起叠加在原始RGB图像上。然后,再将图像和任务指令输入到GPT - 4o中,使用特定的 prompt 来生成所需的阶段数以及每个阶段对应的子目标约束和路径约束。GPT - 4o基于其内部的世界知识来生成这些约束。函数不直接操作关键点位置的数值,而是利用VLM的优势将空间关系指定为关键点之间的算术运算,如L2距离或点积。而只有当使用专门的 3D 跟踪器所跟踪的实际关键点位置被调用时,它们才会被实例化。此外,该实验可以使用算术运算来指定3D旋转,从而使VLM能够在3D笛卡尔空间中通过算术运算来推理3D旋转,避免了处理其他3D旋转中用于”表示“和进行数值计算的需要。■4.3 动作优化为了根据生成的约束获
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















11-08
 4482
4482
4482

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









