









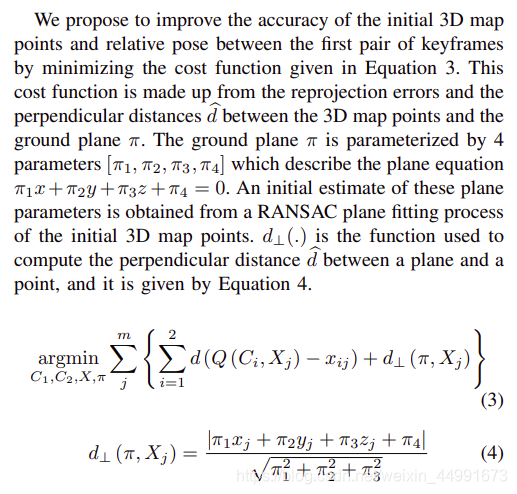
论文想要简化BA,make use of the plane constraint to reduce the complexity of BA,
BA功能:. BA works by minimizing the reprojection errors from an initial estimate of the full camera trajectory and map points using non-linear least square minimization methods such as the Levenberg-Marquardt algorithm.
https://github.com/cggos
使用RANSAC来拟合平面,
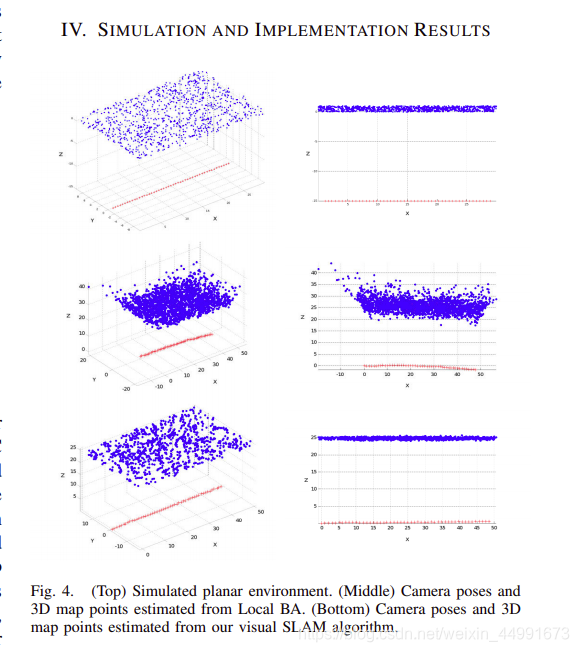
模拟1000个平面上点,以及只有平移的50个相机位位姿做实验,特征点使用高斯分布。
整个过程平面检测

 订阅专栏 解锁全文
订阅专栏 解锁全文















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











