







Octomap安装
sudo apt-get install ros-melodic-octomap-ros
sudo apt-get install ros-melodic-octomap-msgs
sudo apt-get install ros-melodic-octomap-server
sudo apt-get install ros-melodic-octomap-rviz-plugins
# map_server安装
sudo apt-get install ros-melodic-map-server启动rviz
roscore
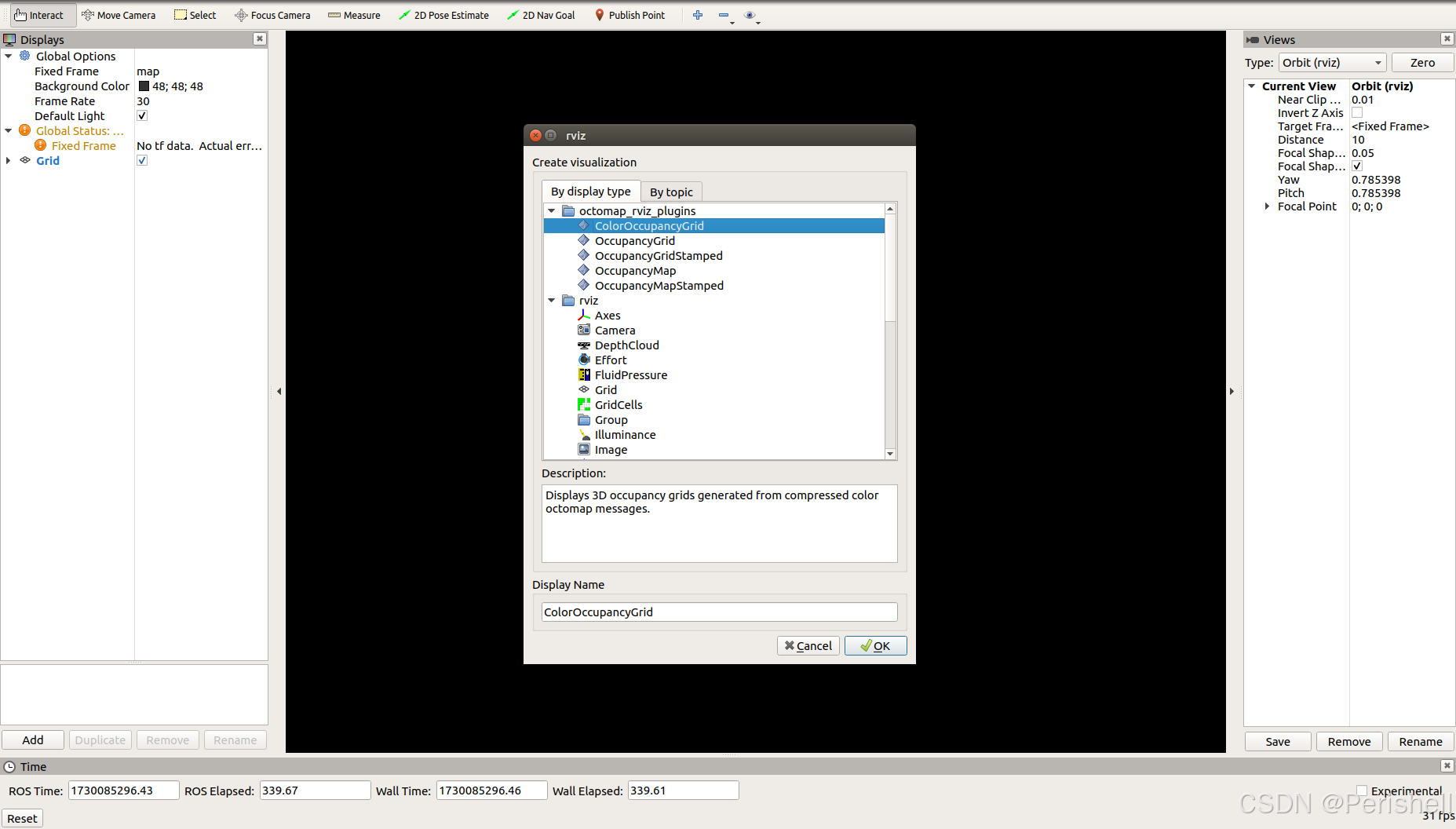
rosrun rviz rviz点击add,可以看到多了Octomap_rviz_plugins模组:
OccupancyGrid是显示三维概率地图,也就是octomap地图。OccupancyMap是显示二维占据栅格地图
从PCD创建PointCloud2点云话题并发布出去:
参考资料:
测试的test数据采用以下第一条博客的pcd测试数据
Octomap 在ROS环境下实时显示_octomap在ros环境下实时显示-飞天熊猫-CSDN博客
学习笔记:使用Octomap将点云地图pcd转换为三维栅格地图,并在rviz中可视化_octomap功能包-CSDN博客
创建点云发布话题的工作空间:
mkdir -p ~/publish_pointcloudtest/src #使用系统命令创建工作空间目录
cd ~/publish_pointcloudtest/src
catkin_init_workspace # ROS的工作空间初始化命令
在工作空间下放入以下两个文件:
octomap_mapping
octomap_server
资源下载:
https://github.com/OctoMap/octomap_mapping
src下创建cpp文件pointcloud_publisher.cpp
#include <iostream>
#include <string>
#include <stdlib.h>
#include <stdio.h>
#include <sstream>
#include <vector>
#include <ros/ros.h>
#include <pcl/point_cloud.h>
#include <pcl_conversions/pcl_conversions.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl/io/pcd_io.h>
#include <octomap_msgs/OctomapWithPose.h>
#include <octomap_msgs/Octomap.h>
#include <geometry_msgs/Pose.h>
#include <octomap/octomap.h>
#include <octomap_msgs/Octomap.h>
#include <octomap_msgs/conversions.h>
#include <geometry_msgs/TransformStamped.h>
#define TESTCLOUDPOINTS 1 // 设置为 1 以测试点云发布,设置为 0 不测试
#define TESTOCTOTREE 0 // 设置为 1 以测试OctoMap发布,设置为 0 不测试
int main (int argc, char **argv)
{
std::string topic, path, frame_id;
int hz = 5; // 发布频率,单位 Hz
ros::init(argc, argv, "publish_pointcloud"); // 初始化ROS节点
ros::NodeHandle nh; // 创建节点句柄
// 从参数服务器获取参数
nh.param<std::string>("path", path, "/home/nvidia/publish_pointcloudtest/data/test.pcd");
nh.param<std::string>("frame_id", frame_id, "map");
nh.param<std::string>("topic", topic, "pointcloud_topic");
nh.param<int>("hz", hz, 5);
// 加载点云数据到pcl::PointCloud对象中
pcl::PointCloud<pcl::PointXYZ> pcl_cloud;
pcl::io::loadPCDFile(path, pcl_cloud); // 从文件加载点云数据
#if TESTCLOUDPOINTS // 如果 TESTCLOUDPOINTS 定义为 1,则执行这部分代码
ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2>(topic, 10); // 创建Publisher对象,将点云数据发布到指定话题
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 961
961

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











