






求助
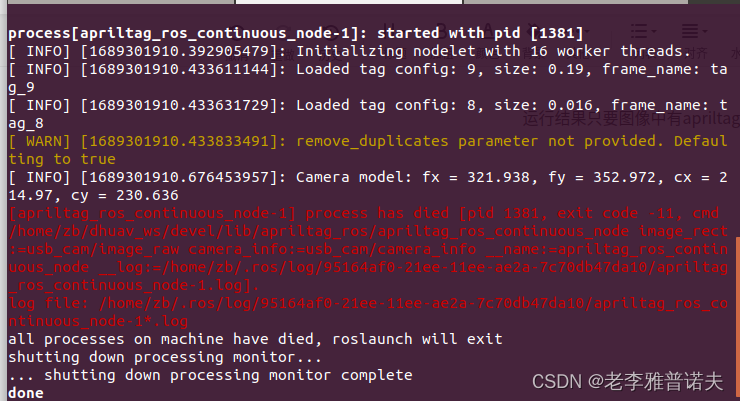
在运行apriltag_ros 功能包的时候,出现报错问题,只有终端打印信息,同时不能找到日至文件:
运行步骤,安装相关功能包:
usb_cam ros-melodic-apriltag ros-melodic-apriltag-ros ros-melodic-apriltag-dbgsym
ros-melodic-apriltag-ros-dbgsym
运行指令:
1 roslaunch usb_cam usb_cam-test.launch
2 roslaunch apriltag_ros continuous_detection.launch
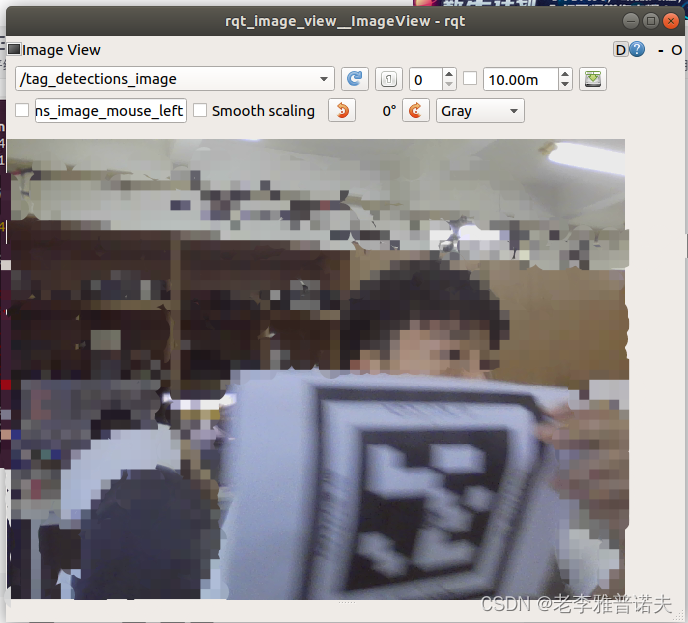
3 rqt_image_view
运行结果只要图像中有apriltag二维码,直接卡死报错。同时找不到日志文件。
PS:旁边的朋友一样的配置,但是可以运行成功。















 8777
8777











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









