







概述
笔者和同事近期购买了Pixhawk6c,它也是目前Pixhawk系列中最新的飞控。
但是在测试的过程中遇到了一个问题,发现它无法连接到mavros。
于是进行了一系列原因摸排,在国内的博客尚未看到能用的解决方案,在px4论坛上倒是找到了答案,这是开发的一个bug,两个月前才被merge到主分支。
可能过段时间就不会有这个问题了,不过在这之前,外网同行们提出的解决方案还是非常有帮助的。
此前可以成功连接
一般将飞控连接到电脑(地面站或者机载电脑)有 两种方式:
- 用TypeC或者其他类型的数据线将飞控直接接到电脑
- 无人机和电脑上各连接一个数传
我们在将老版本的飞控连接到mavros时,只需要按上述两种方式之一连接,然后运行两条命令之一:
roslaunch mavros px4.launch # 数据线连接
roslaunch mavros px4.launch fcu_url:="/dev/ttyUSB0:921600" # 数传连接
可能需要根据端口号不同修改一些参数args(但是我们自己这里与默认值保持一致也没问题)。随即查看消息:
rostopic echo /mavros/state
即可看到connected:true,表示连接成功,飞控和电脑建立了通信。
使用Pixhawk 6c 遇到的问题
同样是按上述两种方式之一连接,然后运行两条命令之一:
roslaunch mavros px4.launch # 数据线连接
roslaunch mavros px4.launch fcu_url:="/dev/ttyUSB0:921600" # 数传连接
mavros可以启动成功,但是会卡在:
[ INFO] [1689140961.169731796]: Known MAVLink dialects: common ardupilotmega ASLUAV AVSSUAS all cubepilot development icarous matrixpilot paparazzi standard storm32 uAvionix ualberta
[ INFO] [1689140961.169740545]: MAVROS started. MY ID 1.240, TARGET ID 1.1
如果和飞控建立了连接,会接着显示:
CON: Got HEARTBEAT, connected. FCU: PX4 Autopilot
显然,这里没有连接成功。
原因排查
-
更换电脑,没解决
-
更新mavros,没解决
sudo apt-get install ros-noetic-mavros ros-noetic-mavros-extras -
数据线和数传连接交替使用,没解决
-
mavros的launch文件的设备名称和端口号有问题,没解决
- 赋予端口权限,没解决 linux串口读写权限
通过MAVROS连接机载电脑(NANO/TX2/NX)与Pixhawk
bash sudo chmod 777 /dev/ttyUSB0
bash sudo chmod 777 /dev/ttyACM0- 用命令
ls /dev检查端口号(对比插拔前后的端口号变化),没解决
我没有弄错端口号,数据线的时候是ttyACM0,数传的时候是ttyUSB0。MAVROS started. MY ID 1.240, TARGET ID 1.1
-
配置Pixhawk上的Telem2作为MAVLINK端口,没解决
通过MAVROS连接机载电脑(NANO/TX2/NX)与Pixhawk
PIXHAWK飞控通过串口连接MAVROS
在QGC里的参数设置处进行如下修改:- MAV_1_CONFIG= TELEM 2
- MAV_1_MODE = Onboard
- SER_TEL2_BAUD = 921600 8N1
一开始参数里可能只有MAV_1_CONFIG,搜不到其他的参数,只需要先把MAV_1_CONFIG设置为TELEM 2,然后把飞控重启后就有了。
-
改波特率,没解决
通过MAVROS连接机载电脑(NANO/TX2/NX)与Pixhawk
38400、57600、921600、115200都试过。 -
ttl的rx和tx线序有问题,没解决
mavros永远连接失败
telem是用排线接的,不存在线序的问题。 -
USB接口电压不够,没解决
px4连接不了mavros的原因
电源灯亮了,提示音响了,不是电压的问题。 -
先用QGC连接成功,再关闭QGC,紧接着 roslaunch px4.launch,勉强解决
Pixhawk 4 mini via USB not sending parameters untill connected to a ground station -
原来是个bug,两个月前才被merge到px4主分支,成功解决
Problems connecting a Pixhawk 6c to a Raspberry Pi
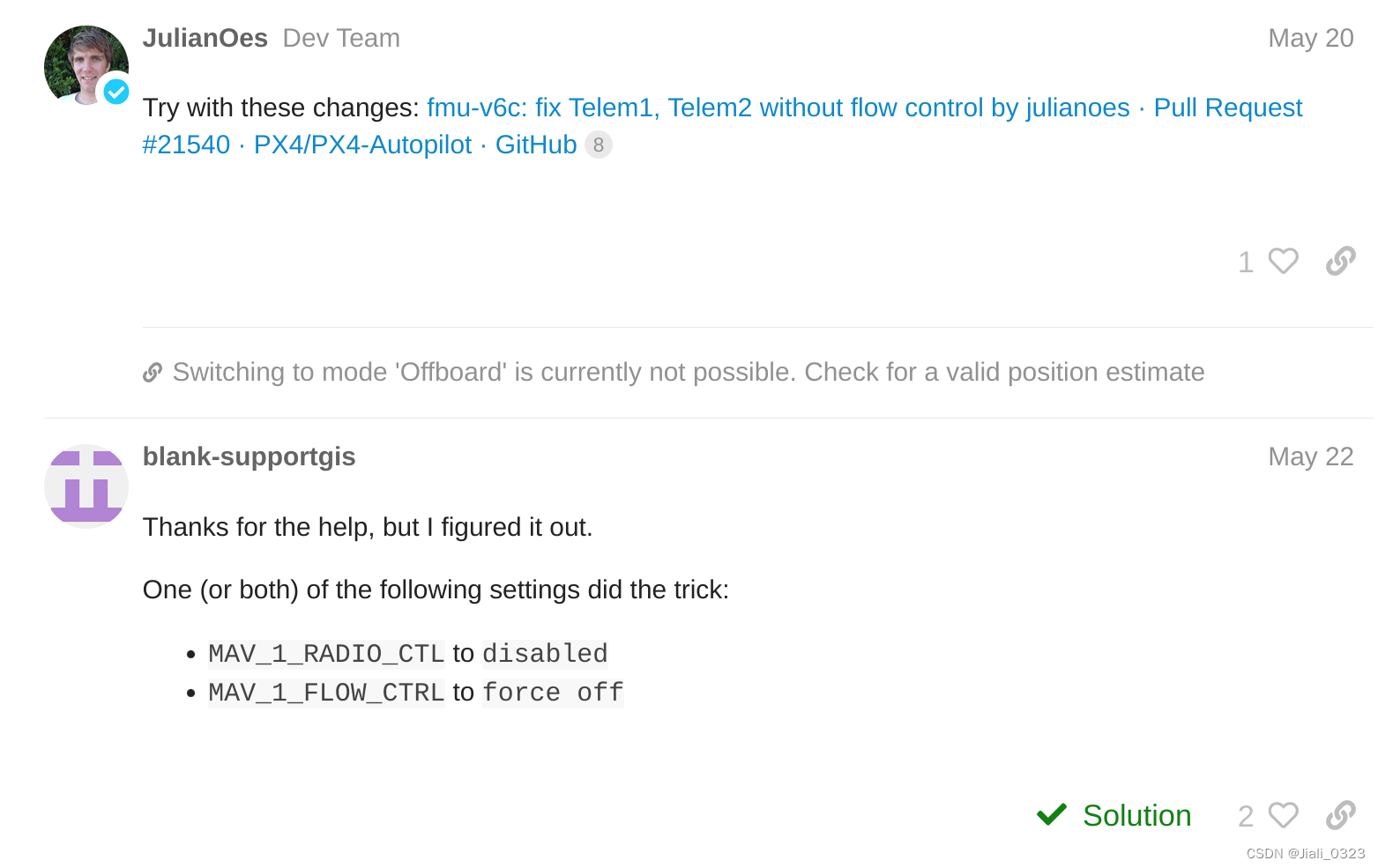
两个方案:
- 上github下载最新的源码,重新编译固件
- 在QGC中参数设置处,将下面两个参数中的任意一个或两个设为:
- MAV_1_RADIO_CTL: disabled
- MAV_1_FLOW_CTRL: force off
https://discuss.px4.io/t/problems-connecting-a-pixhawk-6c-to-a-raspberry-pi/32318
https://github.com/PX4/PX4-Autopilot/compare/v1.14.0-beta2…v1.14.0-rc1















 4796
4796











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









