






有时候当配置完move_base各个文件,准备开启move_base节点愉快的进行导航时,打开Rviz,使用2D Nav Goal工具发布了一个目标点,会出现全局规划路径,但机器人不动,开启move_base节点的终端出现以下错误:
[ERROR] [1669281693.716503087, 871.669000000]: Extrapolation Error: Lookup would require
extrapolation -0.044000000s into the future. Requested time 871.665000000
but the latest data is at time 871.621000000, when looking up transform
from frame [odom] to frame [map]
[ERROR] [1669281693.716542307, 871.669000000]: Global Frame: odom Plan Frame size 156: map
讲nav04_amcl.launch文件里的transform_tolerance 值该大一些
<param name="transform_tolerance" value="0.2" />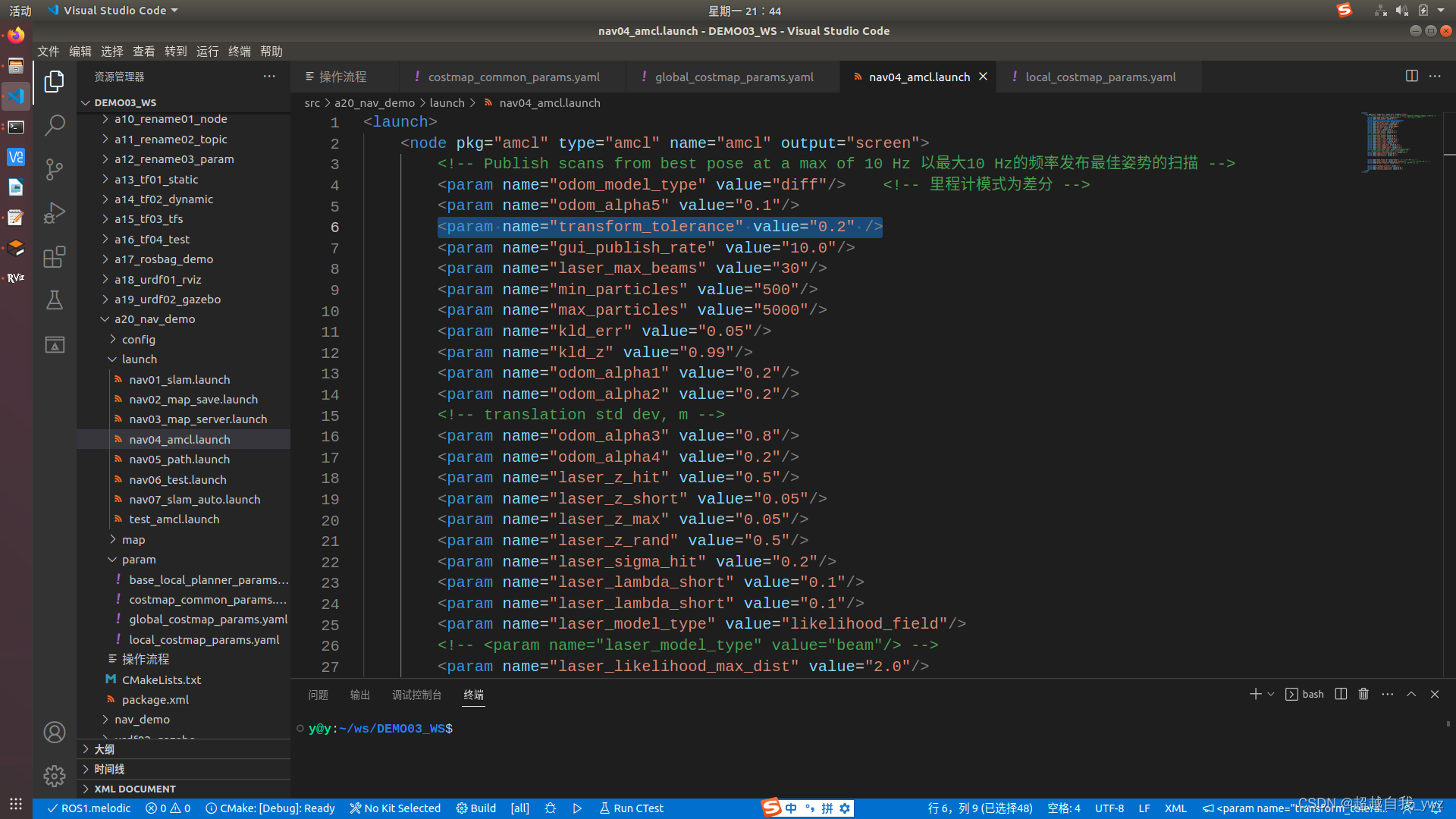














 8763
8763











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









