







无人机的PID调试以及速度相关参数
1、Multicopter Position Control主要是用来设置无人机的各种速度和位置参数。调试顺序是先调试内环PID,也就是无人机的速度闭环控制,确认没有问题后再进行外环位置控制,也就是定点模式控制。
2、调试的时候全部放在定点模式进行,并且设置为sport模式,其中参数MPC_POS_MODE用来设置模式,具体可以参考截图即可

问题1、MPC_XY_P是外环P控制,发散的情况下,如果是逐渐发散,通常将P改大,如果快速发散,则通常将P改小,同理MPC_Z_P是高度位置控制。此外还有积分I和微分D。
问题2、如果是调节内环速度PID的话,通常是对应参数MPC_XY_VEL_P_ACC,旧版QGC不显示该参数,如下图所示,通常先调节内环速度PID
PID动态在线调参数,通常使用如下界面进行,Rate Controller和Altitude Controller用于调节姿态,一般情况下无需调整,Velocity Controller用于调节内环PID,Position Controller用于定位位置调节,可以根据setpoint和response判断是否基本合适

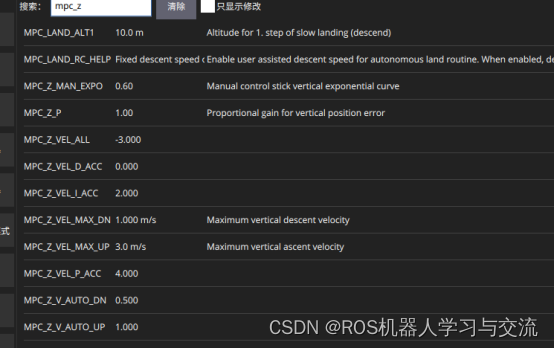
问题3、为了防止速度过大,一般可以设置无人机的最大速度,主要是设置参数MPC_XY_VEL_MAX,同理可以设置z方向,也就是上升和下降的速度,即参数MPC_Z_VEL_MAX_DN和MPC_Z_VEL_MAX_UP


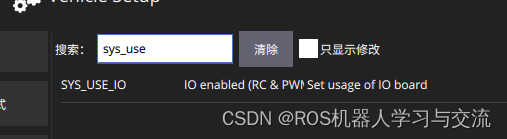
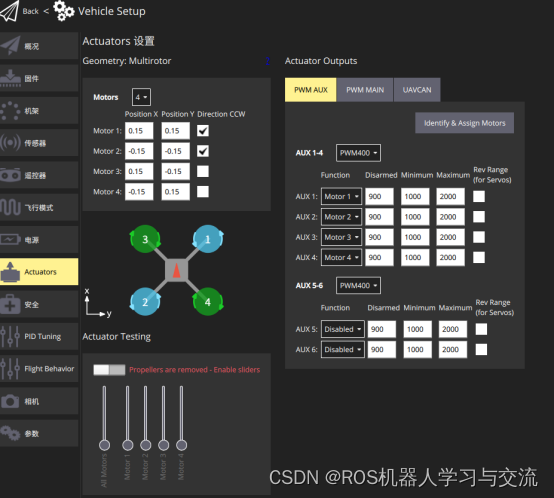
3、改用辅助通道和主通道控制输出pwm波,修改以下参数,其中sys_use_io=1表示使用主通道,0的时候表示使用辅助通道。通常使用辅助通道,因为辅助通道的响应更灵敏

4、注意点:定高模式下,无人机漂移较大主要是因为校准的时候无人机倾斜比较大造成的,可以通过规范校准无人机降低漂移问题
5、无人车和无人船遥控器校准过后需要改一个参数RC3_TRIM,否则无法实现倒退功能,初始值是1000,改成1500
6、注意在进行校准的时候,可以在alloc中将电机的PWM值全部设置为1000再进行校准,这样操作起来解锁后电机转速比较合适,一般是1075左右,大于1000,可以正常解锁。如果在1100的基础上校准,则校准过后没法直接解锁,需要增大PWM才行。
7、在关闭alloc以后,辅助通道的电机PWM通过参数设置需要先改成主通道才能看到相关参数,先打开主通道,单数如下,改成enable

然后设置PWM_AUX_MIN为1100即可,其他四个参数不用改,会自动更新适配的值

8、在使用舵机的时候,可以通过alloc查看对应通道的pwm频率,舵机一般改为PWM50即可。另外需要关闭alloc才能控制舵机
9、1.13.2及后续版本支持在线动态可视化调参数,需要设置以下参数才能打开可视化界面,两个参数设置以后就可以在可视化界面配置辅助通道还是主通道以及电机顺序等等
(1)、设置参数SYS_CTRL_ALLOC为enabled
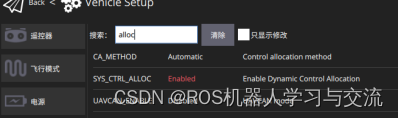
(2)、设置参数SYS_USE_IO为enabled
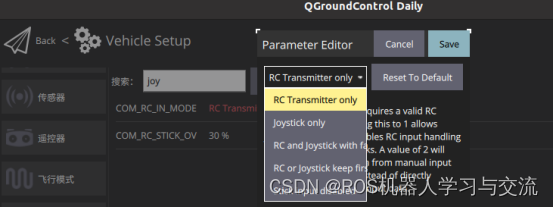
10、遇到遥控器不能切换模式的情况,解决方案如下:
Step1: 关掉QGC,重启飞控,单独使用遥控切模式,如果可以,则可能是参数的问题
Step2: 搜索参数COM_RC_IN_MODE,设置为第一个模式,如下即可



















 5003
5003

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











