






👨🎓个人主页
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
FMCW雷达多运动目标检测研究
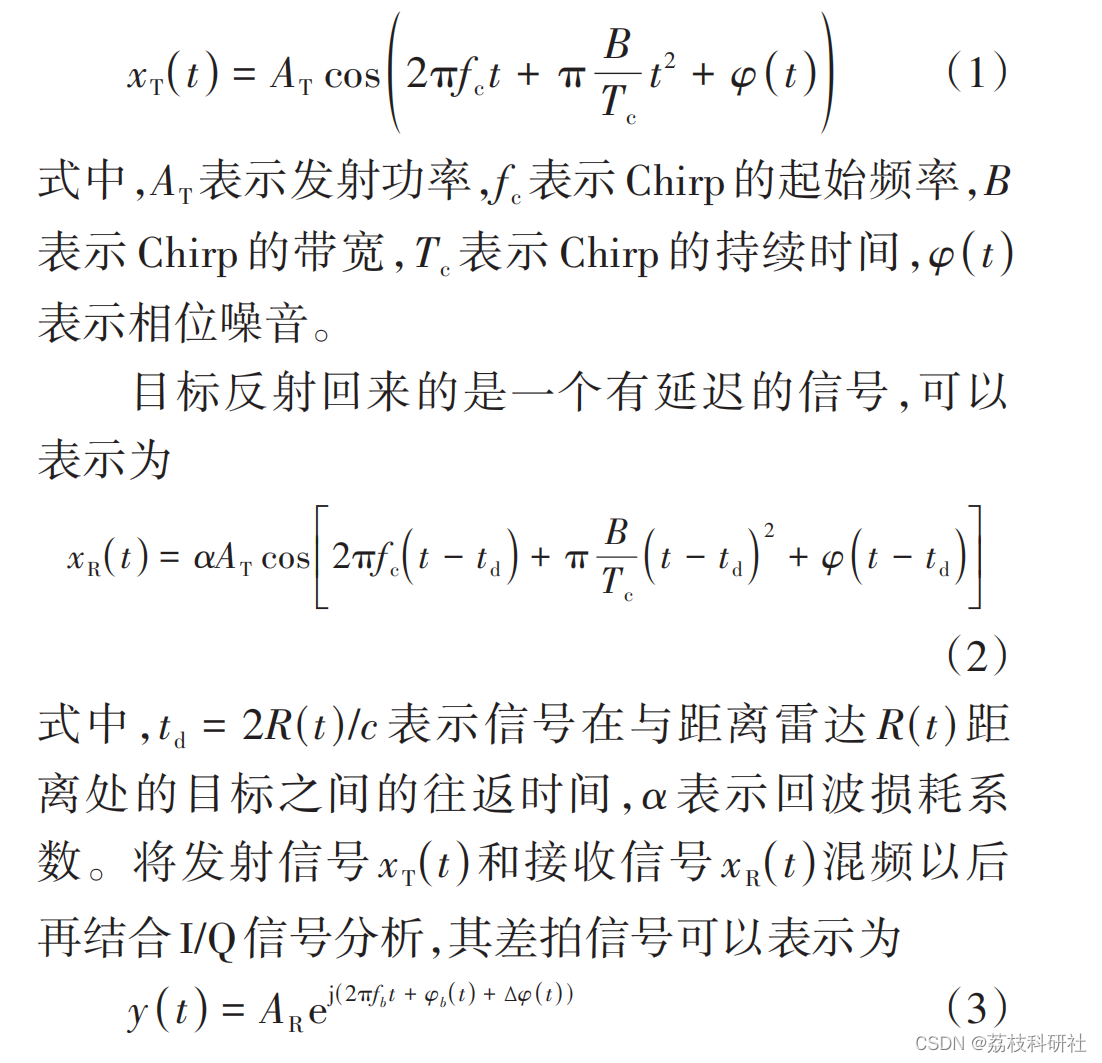
FMCW雷达由一个波形发生器、一个带有2个发射器和4个接收器的天线阵列、一个信号解调器和一个模数转换器(ADC)组成。波形发生器通过发射Chirp信号,然后利用低频滤波器(LPF)得到中频信号。假设FMCW雷达发射调频连续波信号,其发射信号模型3可以表示为:
该程序通过最小二乘法形成多个移动目标的图像。它可以同时对许多目标进行成像。
一、FMCW雷达基本原理
FMCW(调频连续波)雷达通过发射频率随时间线性变化的连续波信号实现测距与测速。其核心原理包括:
- 三角波调频特性:发射信号频率以三角波形式周期性变化(上升沿与下降沿斜率相同),形成带宽为B的线性调频脉冲(Chirp)。频率变化率S= B/Tc,Tc为Chirp持续时间。
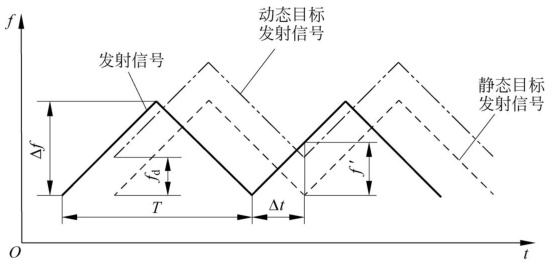
- 中频信号(IF)生成:接收信号与发射信号混频后,产生与目标距离相关的差频信号。对于静止目标,差频频率为f_b = S·τ = 2Sd/c,其中d为距离,τ为往返时间。
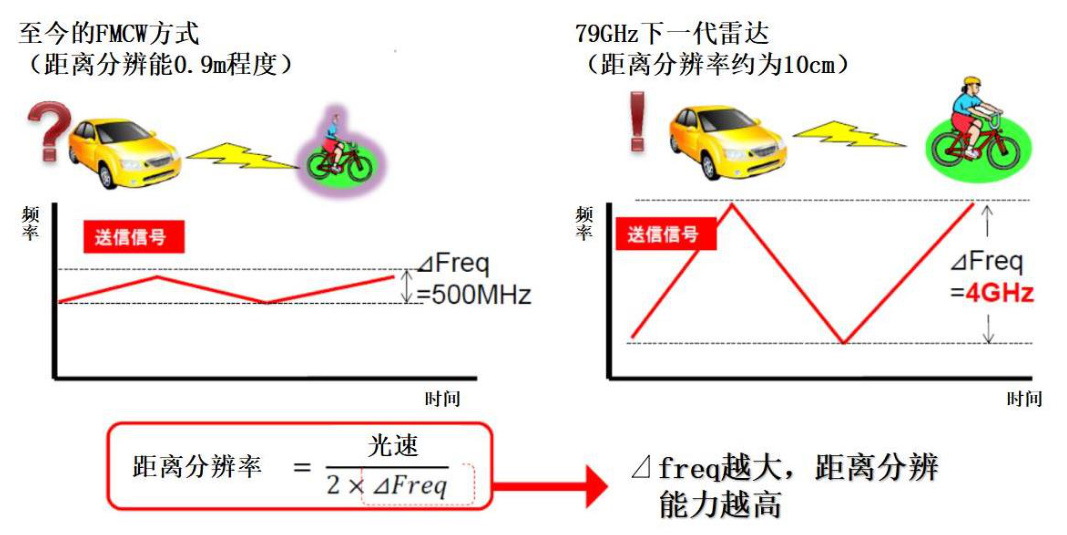
- 多目标分离:通过FFT将IF信号转换至频域,不同目标的距离对应频谱中不同峰值。例如,带宽B=4GHz时,距离分辨率可达3.75cm。
- 速度检测:利用多普勒效应,通过多个Chirp间的相位变化计算速度。速度分辨率Δv=λ/(2NTc),N为Chirp数量。
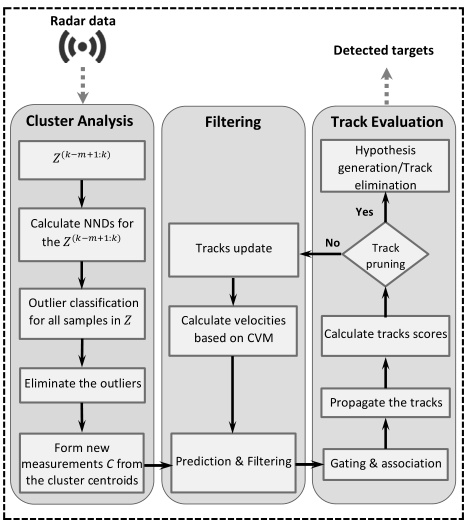
二、多运动目标检测技术难点
- 动态目标分离:
- 速度-距离耦合:运动目标的距离与速度在单Chirp内存在耦合效应,需通过三角波上下扫频解耦。
- 频谱混叠:目标间距小于距离分辨率时,FFT无法区分。增大带宽B可提升分辨率。
- 遮挡与干扰:
- 多目标遮挡:密集场景下,目标回波相互叠加,需采用超分辨率算法(如MUSIC、压缩感知)分离。
- 环境噪声:动态背景(如雨雪)和电磁干扰(如其他雷达信号)会降低信噪比,需结合滤波与编码技术抑制。
- 实时性要求:
- 处理延迟需控制在毫秒级,例如自动驾驶场景要求24帧/s以上的更新率。传统FFT计算复杂度为O(NlogN),大规模多目标时需优化算法。
三、关键技术突破
1. 信号处理算法
-
二维FFT与距离-多普勒图:
快时间维(单个Chirp内采样)FFT获取距离信息,慢时间维(跨Chirp)FFT提取速度信息,形成距离-多普勒图(RDM)。公式:

其中f_up和f_down分别为上下扫频差频。 -
压缩感知技术:
在MIMO-FMCW雷达中,利用稀疏阵列减少天线数量,通过OMP算法从少量测量中恢复多目标参数,分辨率比传统FFT提升2-3倍。
2. 多目标分离算法进展
| 方法 | 原理 | 优势 | 局限 |
|---|---|---|---|
| 传统FFT+CFAR | 基于阈值检测分离频谱峰值 | 计算简单,实时性好 | 分辨率受限于带宽,无法处理密集目标 |
| 迭代插值 | 通过多次FFT插值细化频谱,消除旁瓣干扰 | 距离精度提升至毫米级 | 计算量增加30% |
| 深度学习 | 训练CNN网络识别RDM中的目标特征 | 抗干扰能力强 | 需大量标注数据,硬件要求高 |
四、应用场景与性能参数
| 应用领域 | 典型场景 | 性能要求 | 技术方案 |
|---|---|---|---|
| 自动驾驶 | 车辆/行人检测 | 最大探测距离200m,分辨率≤0.1m | 77-81GHz频段,MIMO阵列 |
| 工业机器人 | 物料定位 | 实时更新率≥30Hz | 24GHz FMCW,跳频抗干扰 |
| 安防监控 | 入侵检测 | 角度分辨率≤1° | 相控阵天线+超分辨率算法 |
| 医疗监测 | 多人呼吸检测 | 微动检测精度0.1mm | 60GHz毫米波雷达,三雷达空间布置 |
五、抗干扰技术对比
| 技术类型 | 原理 | 效果 | 适用场景 |
|---|---|---|---|
| 相位编码FMCW | 在Chirp信号中嵌入伪随机序列,抑制欺骗干扰 | 虚假目标减少80% | 车载雷达 |
| 跳频调制 | 在超宽带内随机切换频率,避免频谱混叠 | 干扰抑制比提升20dB | 工业传感器 |
| 深度学习去噪 | 使用轻量级Transformer网络实时滤除干扰 | 处理延迟<5ms | 无人机/智能交通 |
| 极化滤波 | 利用目标与干扰的极化差异分离信号 | 信噪比提升15dB | 复杂电磁环境 |
六、未来研究方向
- 多模态融合:结合激光雷达与摄像头数据,解决极端天气下的目标漏检问题。
- 量子雷达技术:利用量子纠缠特性提升抗干扰能力与分辨率(文献延伸)。
- 能耗优化:开发低功耗ASIC芯片,满足IoT设备的长时间监测需求。
结论
FMCW雷达在多运动目标检测中展现出高精度与强抗干扰能力,但其性能受限于信号处理算法与硬件设计。通过压缩感知、深度学习等技术的引入,未来在自动驾驶、智能医疗等领域将实现更广泛的应用。
📚2 运行结果
部分代码:
% Because for close range and high speed targets, the side lobe in the velocity direction is very
% high, so the chebwin window is added to lower the side lobe. This step
% perhaps is unnecessary for far range target such as farther than 5
% meters;
w=chebwin(nan);
for k=1:nrn
x(k,:)=x(k,:).*w.';
end
x=fft(x,nan,2);
x=fftshift(x,2);
% Because for close range and high speed targets, the side lobe severely
% effect the detection, so for far range such as farther than 5 meters, these
% lines need not be zeroed.
x(:,1)=0*x(:,1);
x(:,2)=0*x(:,2);
x(:,end)=0*x(:,end);
x(:,end-1)=0*x(:,end-1);
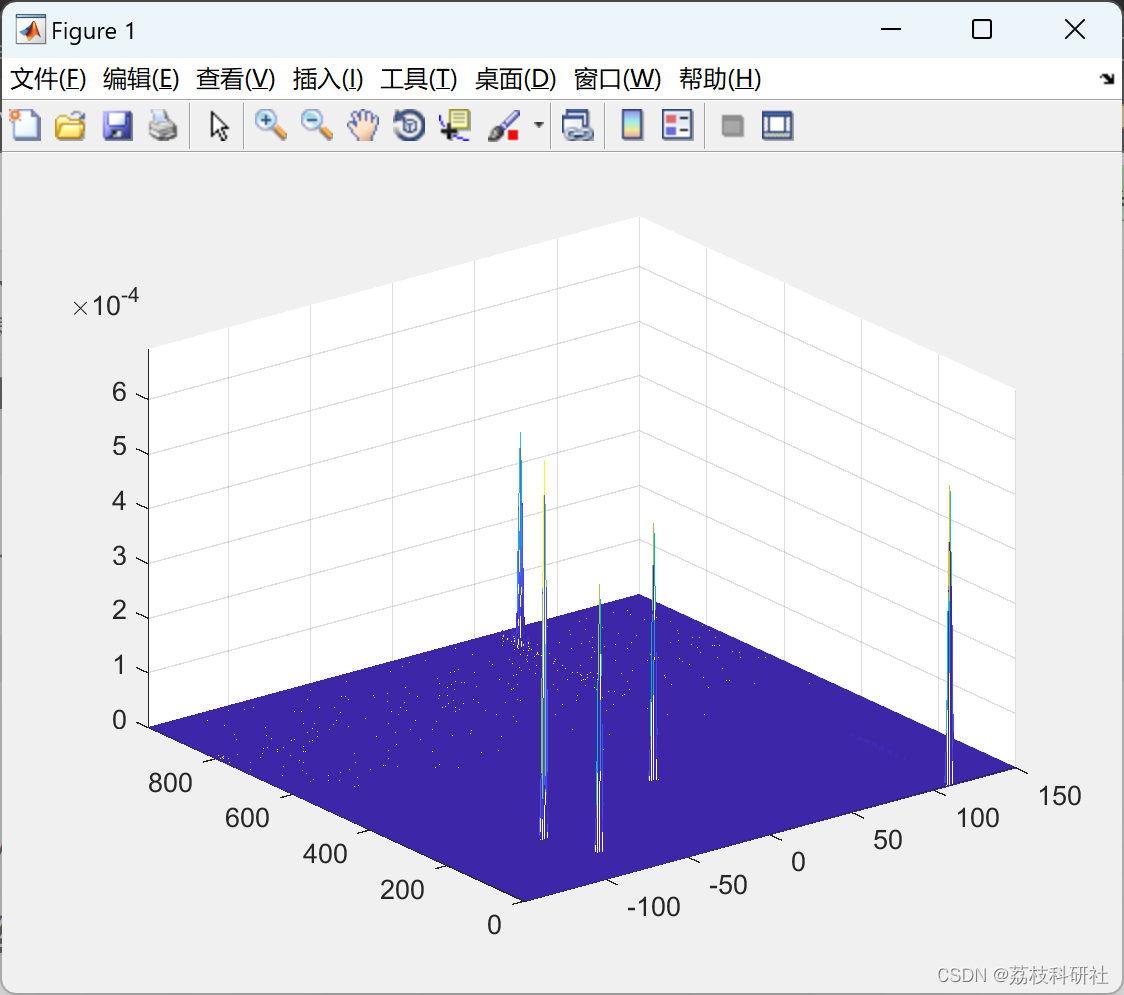
V=fftshift(Vel);
[Vgrid,Rgrid]=meshgrid(V,Rs);
figure;mesh(Vgrid,Rgrid,abs(x));axis tight;
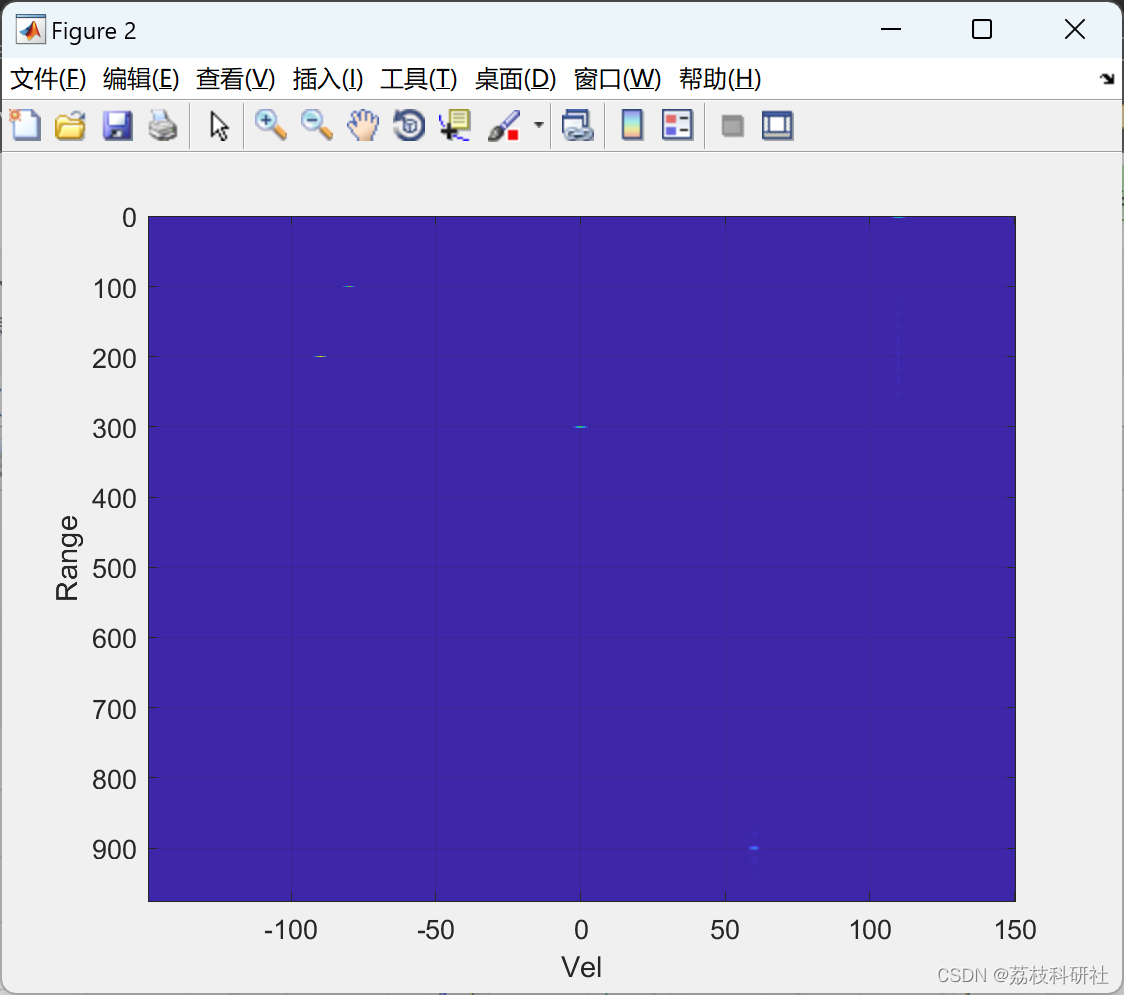
figure;imagesc(V,Rs,abs(x));grid on;axis tight;
xlabel('Vel');ylabel('Range');
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]缪寅宵,汪星宇,朱浩,鲍晨兴,谭久彬.FMCW激光雷达几何结构精度模型与误差修正[J].光学精密工程,2023,31(09):1295-1303.
[2]蒋留兵,吴岷洋,车俐.FMCW雷达基于光学字符识别的连续动作识别研究[J].雷达科学与技术,2023,21(01):74-81+96.



















 951
951

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











