







一、参考文献:
Zhewei Wei's Homepage 魏哲巍 (weizhewei.com)
平凡的久月的个人空间-平凡的久月个人主页-哔哩哔哩视频 (bilibili.com)
图邻接矩阵、训练数据的标准化及批归一化的原则_邻接矩阵归一化-CSDN博客
图嵌入(Graph embedding)- 简介 - 知乎 (zhihu.com)
二、从卷积神经网络到图结构数据序列:
1.欧氏空间数据与非欧式空间数据:
1.1欧氏空间数据:
欧氏空间是对现实空间的规则抽象与推广(从n≤3推广到有限n维空间),在欧几里得几何中,平行线任何位置的间距相等。在中学中学到的余弦值、点间的距离都是在低纬空间(二维空间)中,如果将低维空间所总结的规律推广到n维空间(正弦、余弦等),这些符合定义的空间则被称为欧氏空间。
再让我们回顾一下概念,在百度百科的定义中“设V是实数域R上的线性空间,如果V上存在定义着正定对称双线性g,则称V是欧几里得空间。”正定对称双线性g满足以下性质。①对称性:②分配律:
③始终在
曲线之上:
且
当且仅当
的时候成立。
内积指的是两个向量的乘积,也就是两个向量的长度称两个向量间的余弦角,如果是两个数列的向量相乘,则是这一系列数列内的向量的乘积再加和。
1.2非欧氏空间数据:
非欧式几何是指不同于欧几里得几何学的几何体系,简称非欧几何,一般指的是罗巴切夫斯基几何和黎曼几何的椭圆几何。黎曼空间是一种非欧几里得空间,是一种弯曲空间,具有不变的线元ds2=gikdxidxk,其中,作为广义坐标(x0,x1,...xn),称为黎曼度规。
通俗的讲,如果空间有四维,而我们生活在三维空间中,而这个三维空间再空间的第四个维度中发生了弯曲,我们的几何必须修正。也就是说对感知不到的维度进行修正的空间被称为非欧式空间数据。
2.图结构数据序列的无序性:
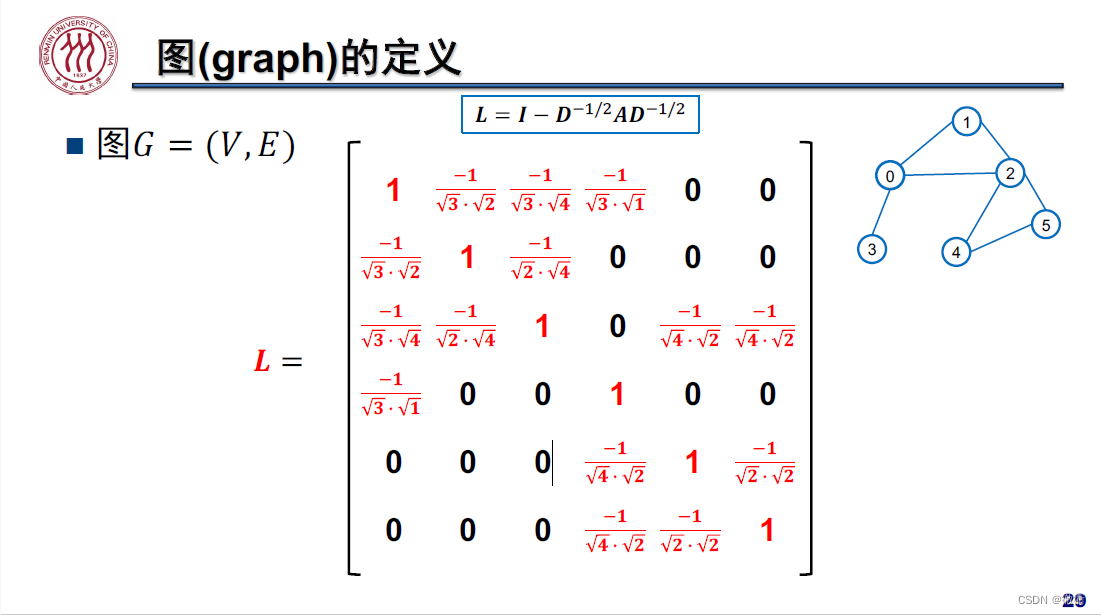
3.图的定义以及归一化拉普拉斯矩阵的计算:
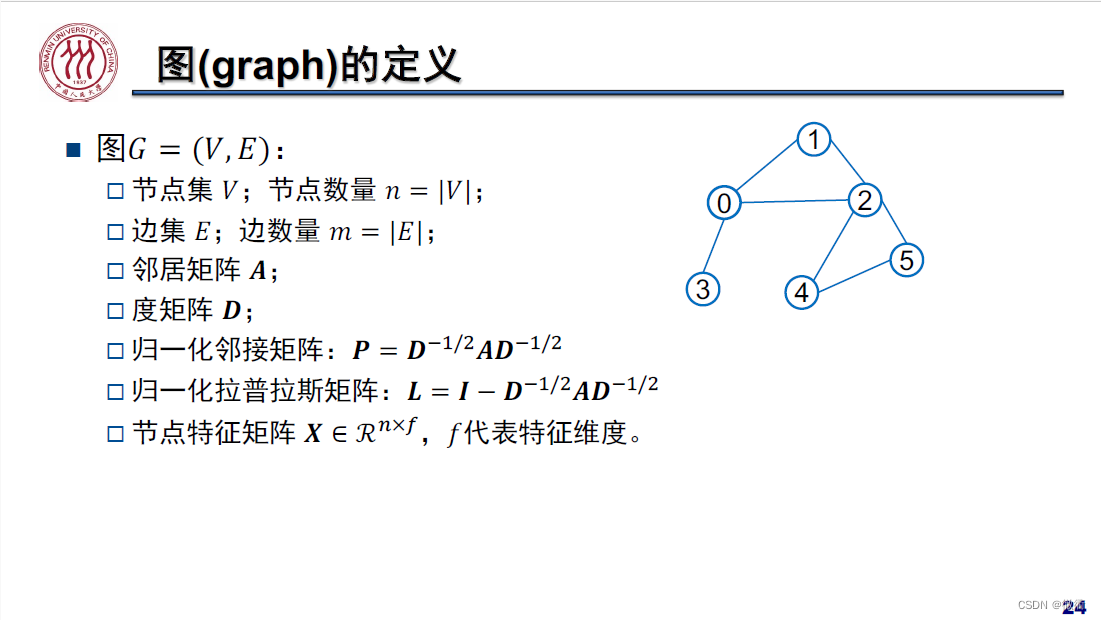
3.1 图的定义:
一个图可以形式定义为一个二元组:,其中
是顶点(结点)的有穷集合。
是边集,连接
中顶点集合中的顶点的边的集合。如果
中的顶点对是有序的,即
中的每一条边都是有方向的,则称
为有向图。如果边集没有方向则称
是无向图。
有向图相较于无向图能带来更多的信息,比如知识图谱中的有向边可以确定父项和子项,无项图可以将节点的边视为节点与节点之间存在两个有向边(例如在下图中节点1和节点0存在两个方向相反的边,发生抵消,故为无向图)
如果下面这个图是一个有向图,则可以描述为
,其中顶点集合
{
},边集合为
{
}。
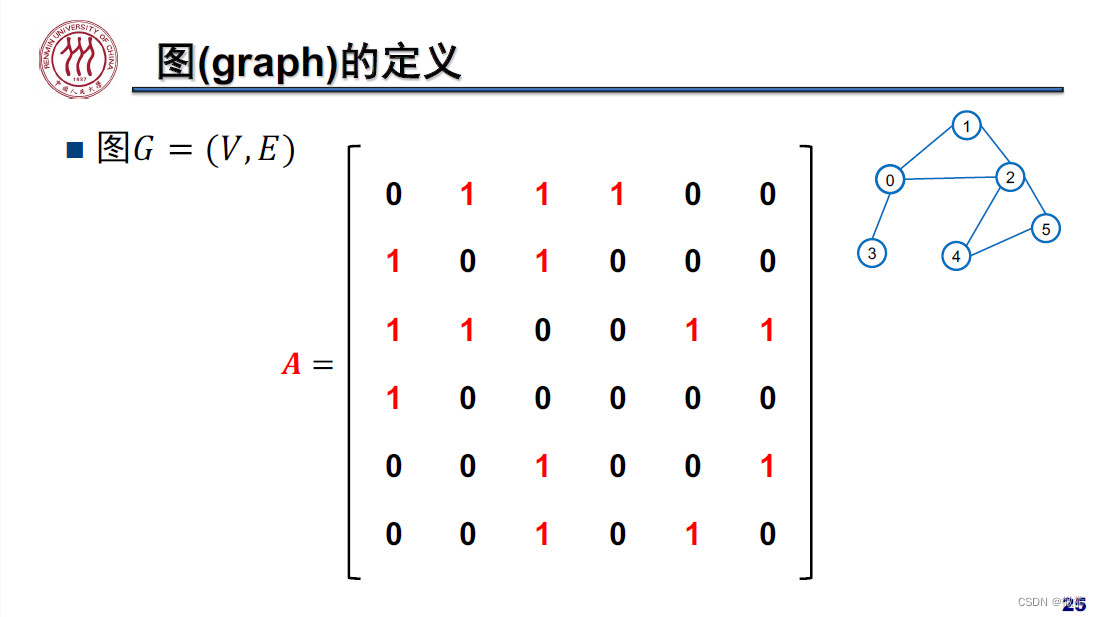
3.2 拉普拉斯矩阵的计算方法以及有向图和矩阵之间的转化:
拉普拉斯矩阵的定义:给定一个具有n个顶点的简单图 =
,
为顶点集合,
为边集合,其拉普拉斯矩阵的定义为
。其中
∈
为邻接矩阵,
∈
为度矩阵。邻接矩阵
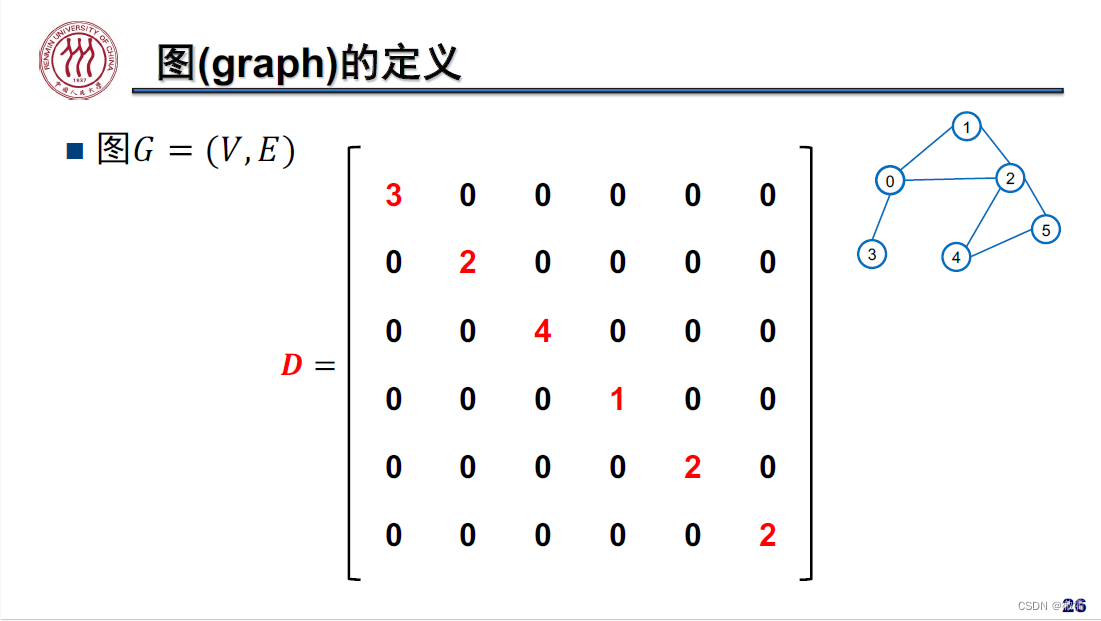
的元素为0和1,其对角线元素全为0。度矩阵
是一个对角矩阵,对角线上元素的计算值为
。
我们对上面这个有向图转化为邻接矩阵和度矩阵,矩阵的宽和高分别代表着顶点,如果顶点
和顶点
存在有向边,则度矩阵为1。
在求解上面有向图的接邻矩阵, 对每一列存在的有向边的数量进行加和,可以得到
存在有向边的数量。如果使用邻接表,可以减少计算机的存储,提高计算速度。(
,
,
)
3.3归一化邻接矩阵以及归一化拉普拉斯矩阵:
为了能够使拉普拉斯举证的对角上的元素全部为1便于计算,我们通过设计归一化邻接矩阵和归一化拉普拉斯矩阵
。归一化邻接矩阵是邻接矩阵和度矩阵的逆矩阵得到
。
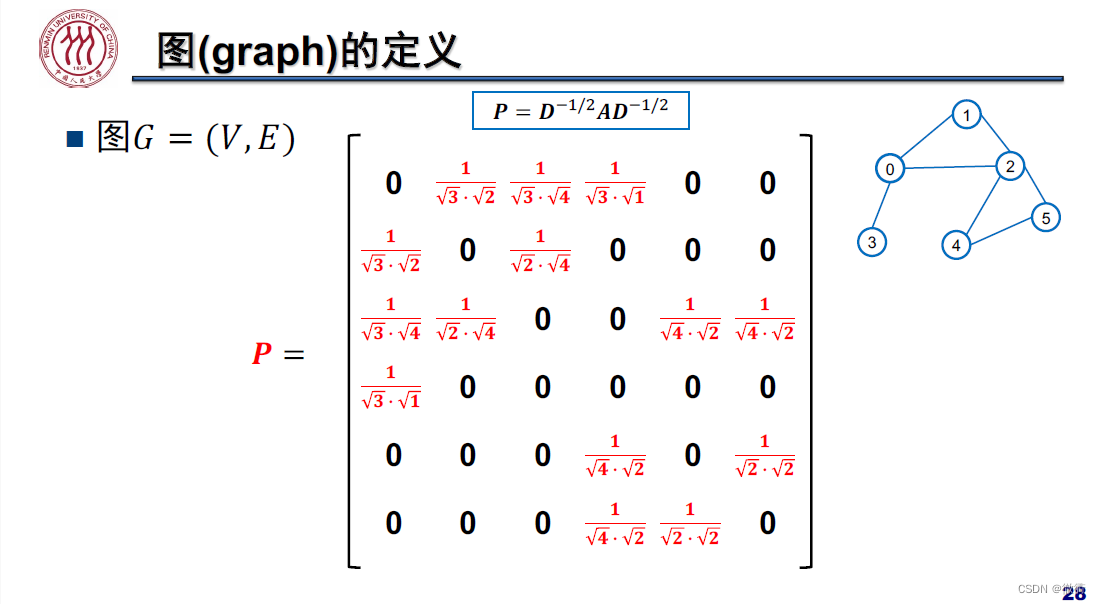
使用对角为1的矩阵减去归一化邻接矩阵即可得到归一化拉普拉斯矩阵。
4.图嵌入(Graph embedding)的基本理论 :
4.1使用图嵌入的原因:
计算机图形是有限的,图由边和节点组成。这些网络关系只能使用数学、统计和机器学习的特定子集,而向量空间有更丰富的方法工具集。使用邻接矩阵作为大型图的特征空间,会大大增加计算成本,使用嵌入矩阵相较于邻接矩阵更加实用,嵌入矩阵可以将节点属性打包到一个维度更小的向量中。运算更快,运算成本更低。
4.2图嵌入的概念:
图嵌入是一种将图数据(高维稠密的矩阵)映射为低纬稠密向量的过程,能够很好地解决图数据难以高效地输入机器学习算法地问题。图嵌入应该捕获图的拓扑结构、顶点到顶点的关系以及关于图、子图和顶点的其他相关信息。
可以将常见的嵌入式方法分为以下两类:①顶点嵌入:每个顶点用其自身的向量表示进行编码。这种嵌入一般用于在顶点层次上执行可视化或者预测。比如在2D平面上显示顶点,或者居于顶点相似性预测新的连接。②图嵌入:用单个向量表示整个图,这种嵌入用于在图的层次上做出预测,常用于比较化学结构。
5.顶点嵌入方法:
顶点嵌入的方法可以分为三大类:因式分解方法、随机游走方法和深度方法。DeepWalk使用随机漫步来生成嵌入,随机游走从一个选定的节点开始,然后我们从一个当前节点移动到随机邻居节点,移动一定数量的步。主要步骤可以分为以下三步:①抽样:用随机游动抽样一个图,作者证明了从每个节点执行32到64游走是足够的,一般良好的随机漫步的长度约为40步。②训练

















 5072
5072











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









