







目录
引言
使用Simulink搭建机器人并求解各工作空间的关系。首先需要借助simscape工具箱对机器人进行建模,之后在其工作空间驱动该机器人,借助算法来控制机器人旋转角度。在基本的水平上到达工作空间的特定点,有两种方法。一是,命令关节旋转到一定的角度,该角度旋转限制内关节和当前关节旋转到特定角度时,末端执行器到达工作空间的相应点,该方法为正运动学;但是在实际中,我们知道末端执行器应该到达所需位置,而且有时会有多个关节角度将机器人带到工作空间的同一点,因此很难直接提供将机器人到达预期位置的关节角度。为了满足这些要求,将工作空间的点并为关节,生成关节角,当关节穿过关节时,末端执行器会到达指定位置,该方法为逆运动学。
在本例中,将使用正运动学算法驱动机器人。
1.建立机器人模型
1.1机器人模型
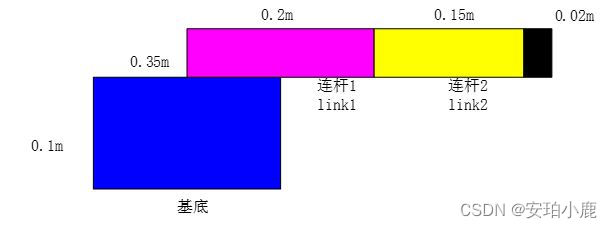
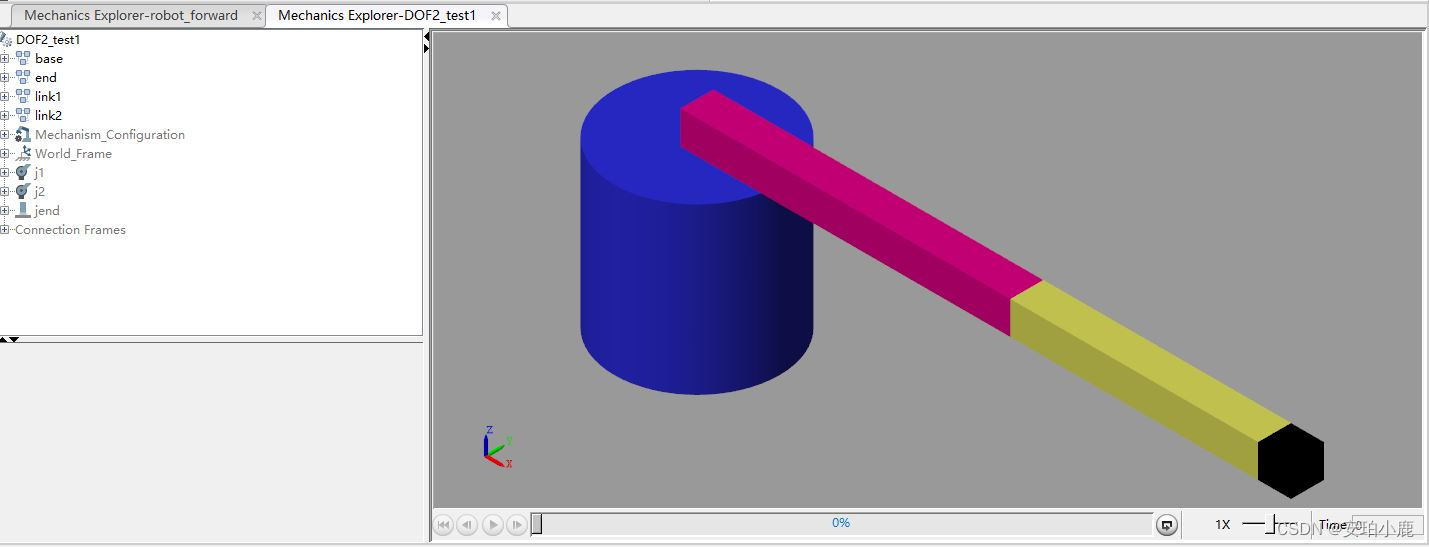
使用Simulink建立串联二自由度机器人。底座为高0.1m,半径0.35m的圆柱体,两个连杆分别为长0.2m、0.15m的长方体。
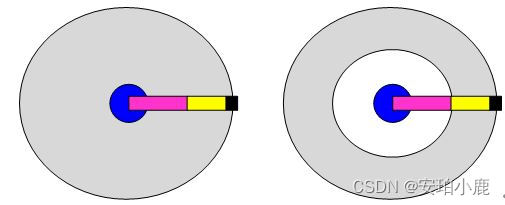
俯视图机器人的工作空间(如图2所示),当机器人开始移动时,灰色区域为其工作空间(图2左),当限制关节2运动,灰色区域为机械臂运动空间(图2右),工作空间为一个圆盘。
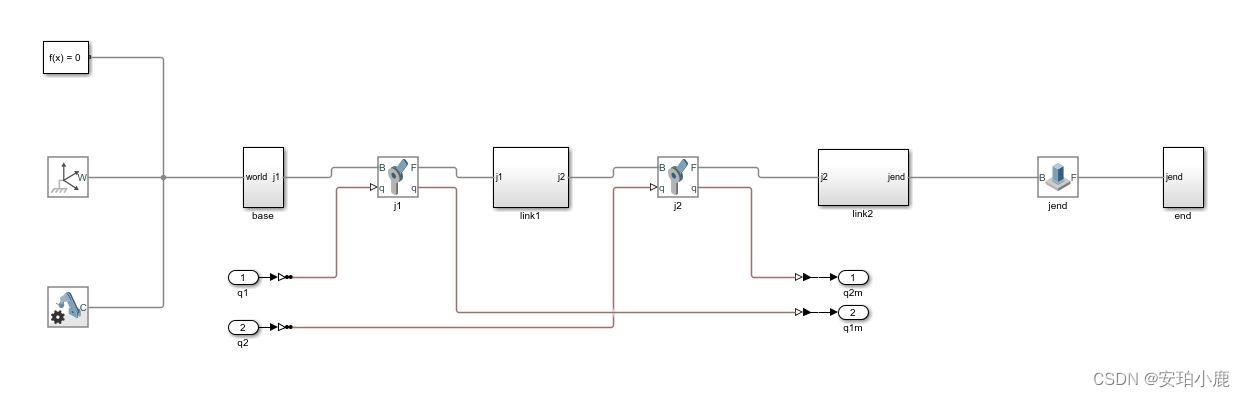
1.2搭建机器人模型
在Simulink中,创建的机器人仿真(具体步骤不在这里陈述了)。
在搭建机器人模型时,共用到七次刚性转换。
如图所示
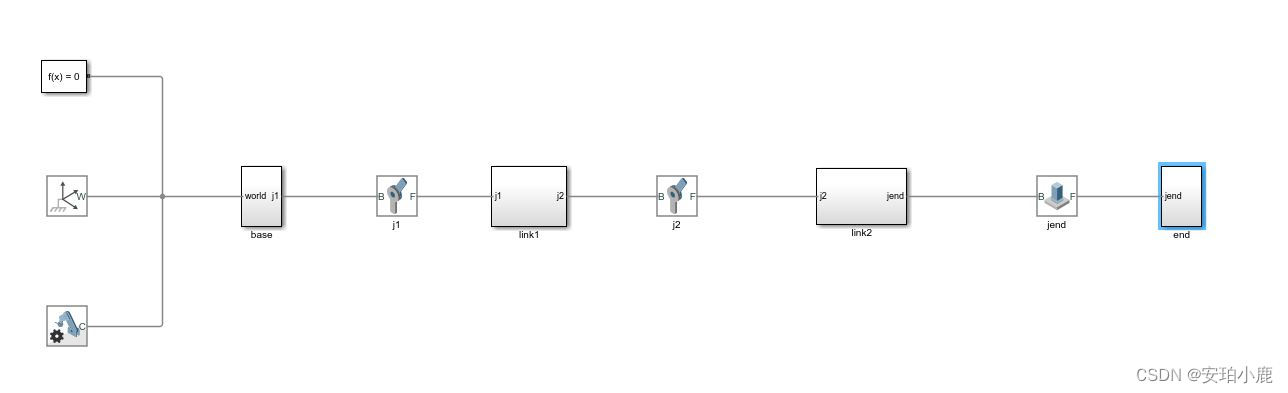
机器人模块
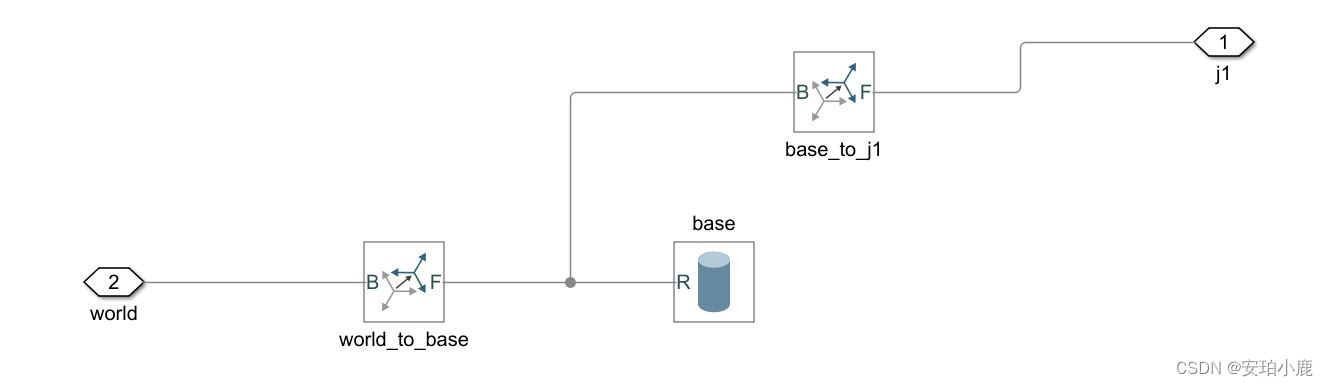 base模块
base模块
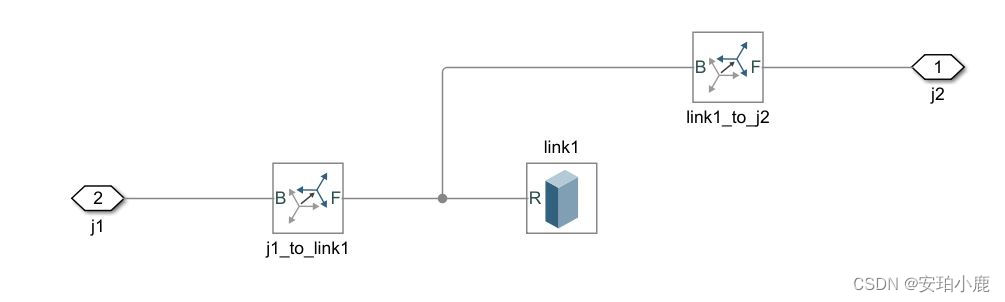 link1模块
link1模块
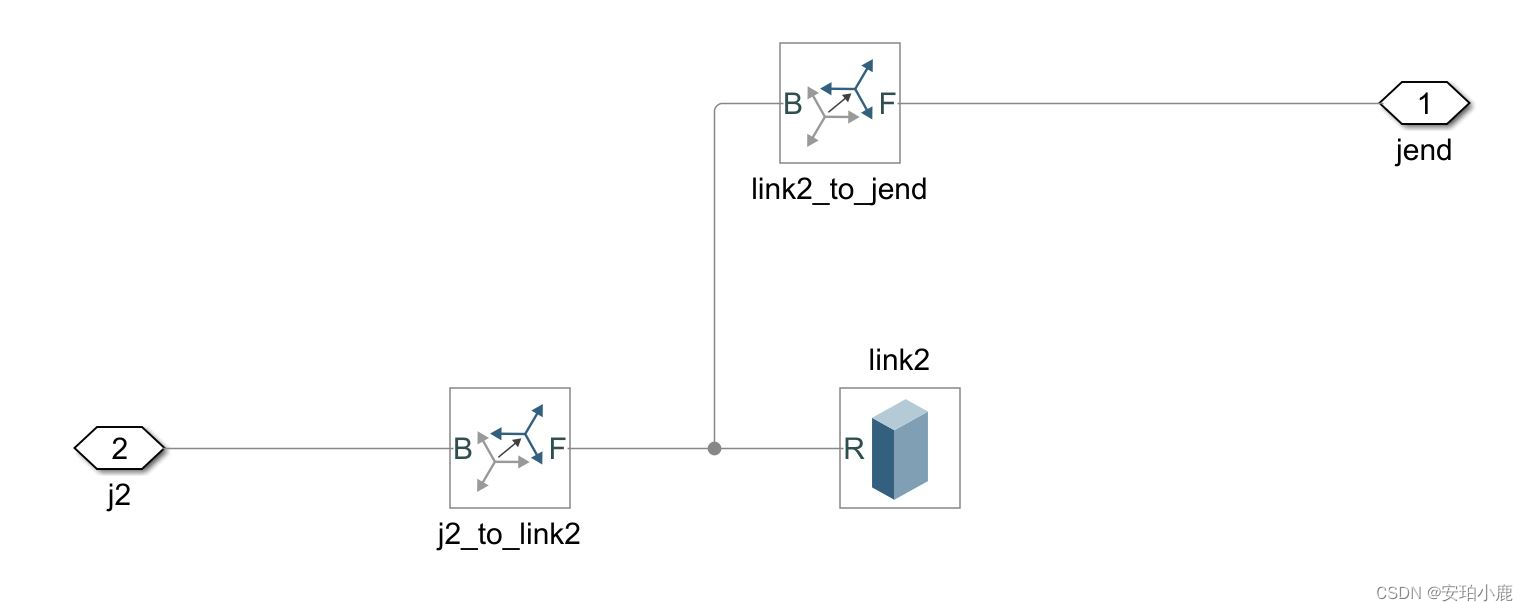 link2模块
link2模块
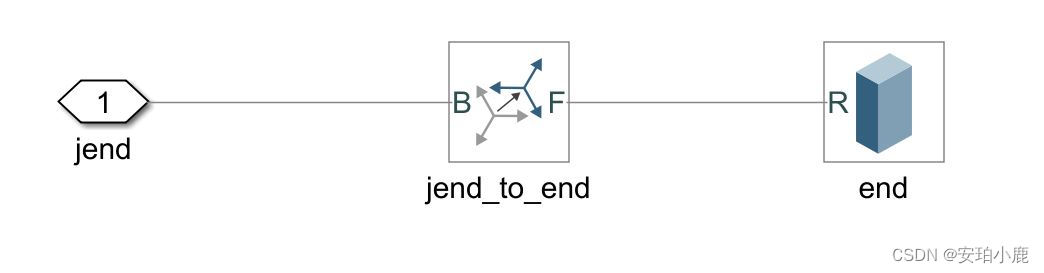 end模块
end模块
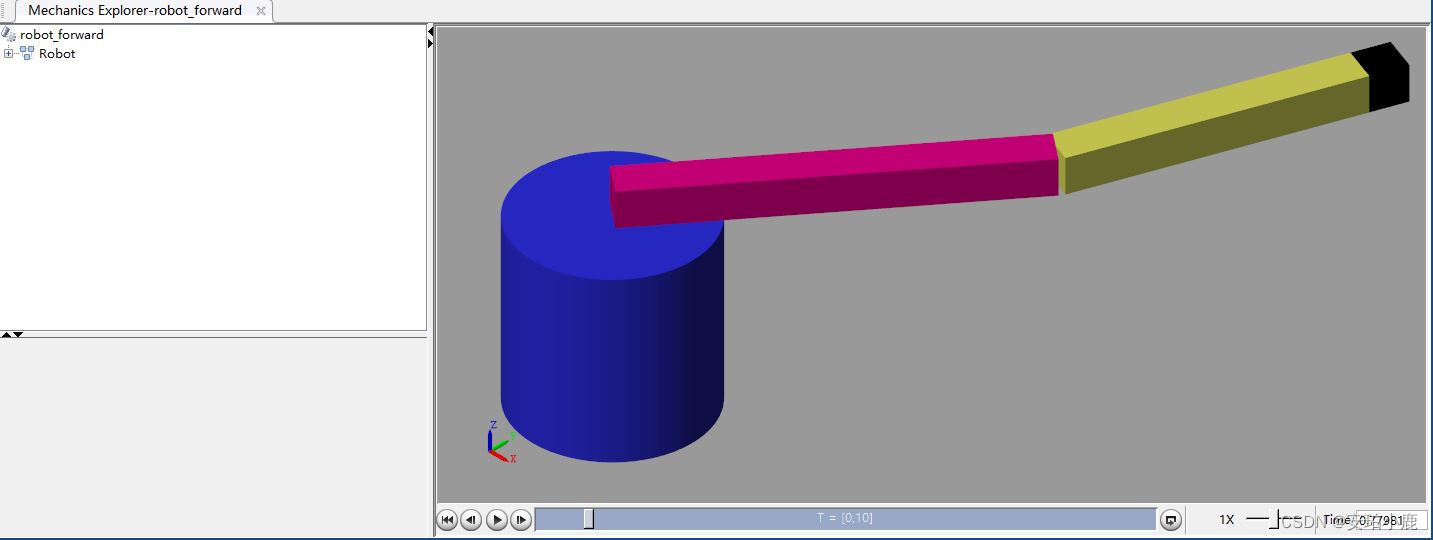
运行该Simulink文件,可以看到搭建好的机器人模型。
1.3创建刚体树
通过以上步骤,已经成功建立机器人模型。使用函数importrobot,创建一个刚体树,这个刚体树可以在Robotics System Toolbox中使用。importrobot函数用来导入机器人,在函数中需要输入包括机器人simscape模型的Simulink模型文件。
clear;
Ts = 0.001; %采样时间为1s
[DOF2_Arm,ArmInfo]=importrobot('DOF2_test1'); %导入模型,创建刚体树并将其命名为DOF2_Arm 
1.4建立机器人模型
机器人运动模型里还需要用到相应的运动算法,机器人模型和其他模块。需要设置关节属性。
1.5正运动学
为机器人提供两个角度,机器人内部的两个关节将在提供的两个角度上移动,最后测量该角度,检测是否在指定角度上移动。计算机器人在x、y、z坐标中的物理位置。
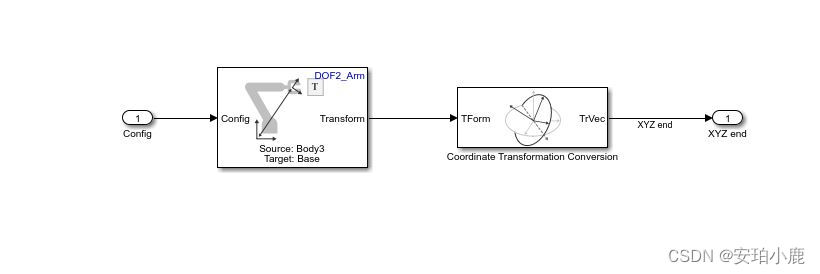
添加正向运动块,用机器人的角度,提供末端执行器的位置。
进入Robotics System Toolbox中,选择变换块,该模块需要刚体树并进行配置。接着进行齐次变换,包括末端执行器的方向和位置,来获取位置信息。需要一个内部坐标变换转换块,使用输入作为齐次变换,以平移向量形式作为输出,将会表示平移向量或者末端执行器的x、y、z位置。使用示波器查看,显示末端执行器的x、y、z位置,在示波器的上边两个端口,显示给出的关节位置和机器人所在的关节位置。
执行该文件,看到机器人正在运动。
示波器显示运动状态。 第一、二波图展示了j1、j2的位置,图三中的三条线表示末端执行器x、y、z的坐标,因为是平面机器人,所以z坐标保持不变,在设置中,他的坐标为0.11。黄线表示x,蓝线表示y。

结论
使用simscape工具箱创建了一个模型,使用该模型生成刚体树,创建刚体树之后,Robotics System Toolbox使用算法。然后使用正弦发生器为机器人的两个关节提供角度,理想情况下应遵循这两个角度,测量机器人是否遵循。通过示波器观测。对于正向运动学,采用了两个关节旋转的位置或角度,将这两个关节提供给机器人工具箱中的正向运动学模块,并且该正向运动学算法计算了末端执行器在x、y、z平面中的位置。

















 92
92

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









