






在运行launch文件后,仿真软件显示在环境中有四个无人机,但不确定这些无人机是否可以运动,因此借助teleop包进行控制。
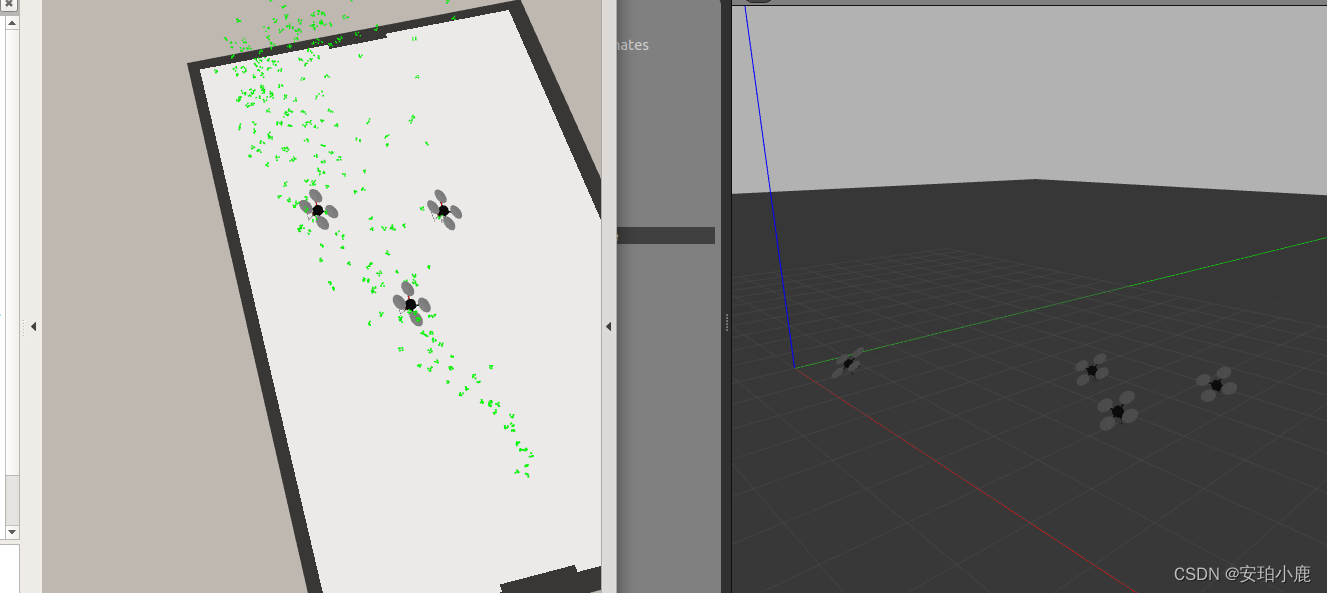
在进行键盘控制时,需要指定机器人
rosservice call /robot_0/enable_motors true//启动无人机电机
ROS_NAMESPACE=robot_0 rosrun teleop_twist_keyboard teleop_twist_keyboard.py
显示true后,证明无人机电机开启,进行键盘控制即可。

在运行launch文件后,仿真软件显示在环境中有四个无人机,但不确定这些无人机是否可以运动,因此借助teleop包进行控制。
在进行键盘控制时,需要指定机器人
rosservice call /robot_0/enable_motors true//启动无人机电机
ROS_NAMESPACE=robot_0 rosrun teleop_twist_keyboard teleop_twist_keyboard.py
显示true后,证明无人机电机开启,进行键盘控制即可。
 3596
3596

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























