






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
Delta并联机器人Simscape仿真(正运动学、逆运动学)
前言
delta机器人(delta robot)也称为三角式机器人,是工业机器人中的并联式机器人[2],末端效应器在机器人的最下方,由三个机械臂连接机器人上的万向接头以及末端效应器。主要设计特点是在机械臂上使用平行四边形结构,可以维持末端效应器(end effector)的方向。这和史都华平台相反,史都华平台可以调整末端效应器的方向[3]。
提示:以下是本篇文章正文内容,下面案例可供参考
一、SolidWorks模型建立、装配及简化图片: 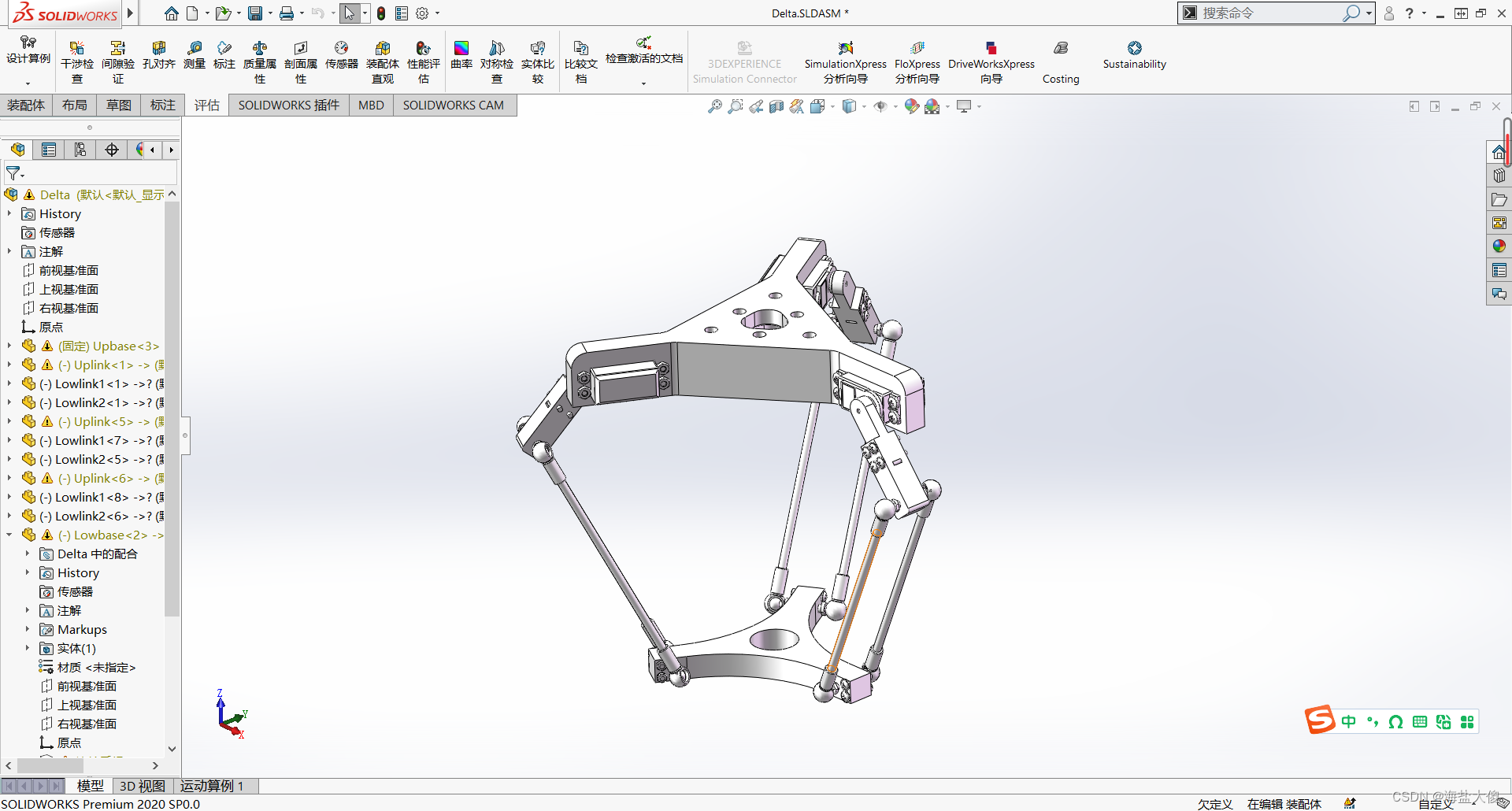
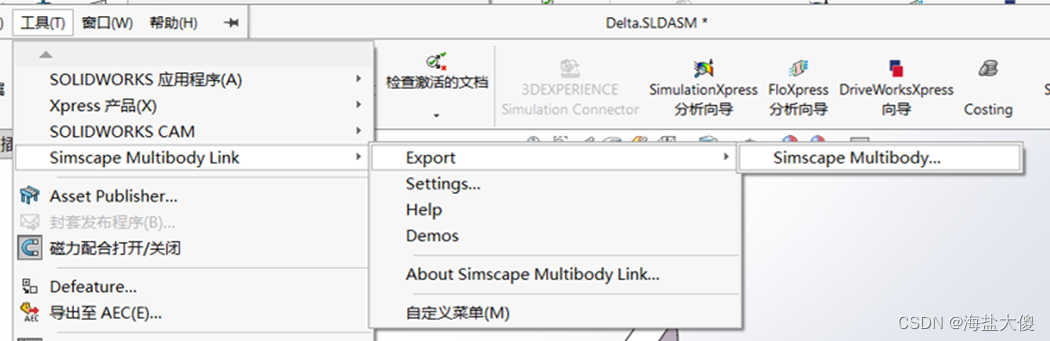
二、模型导入matlab
三、正逆运动学
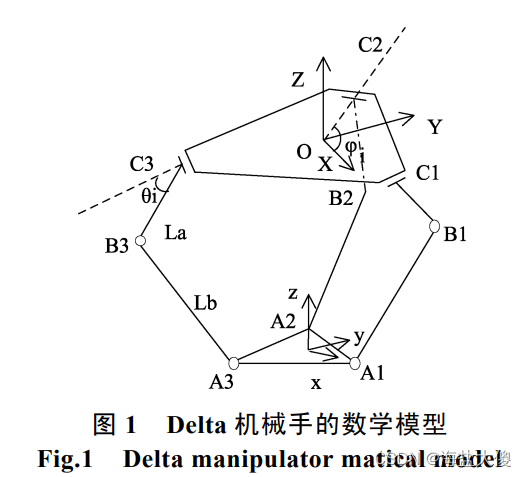
正解:
逆解:
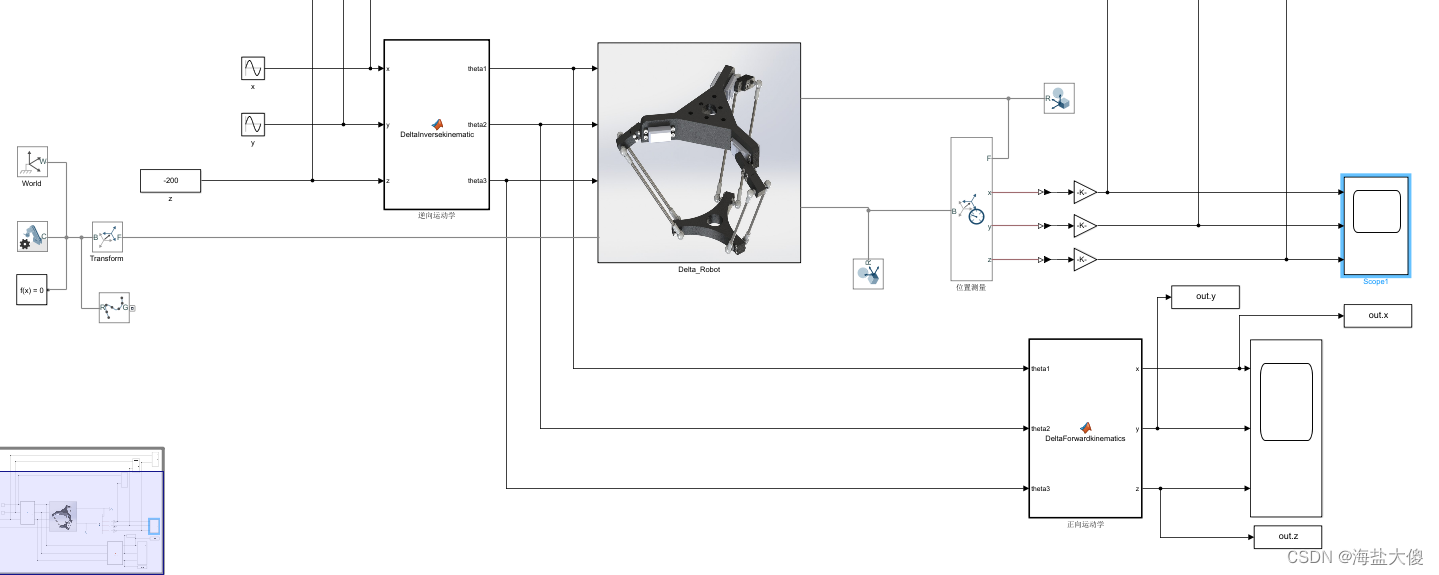
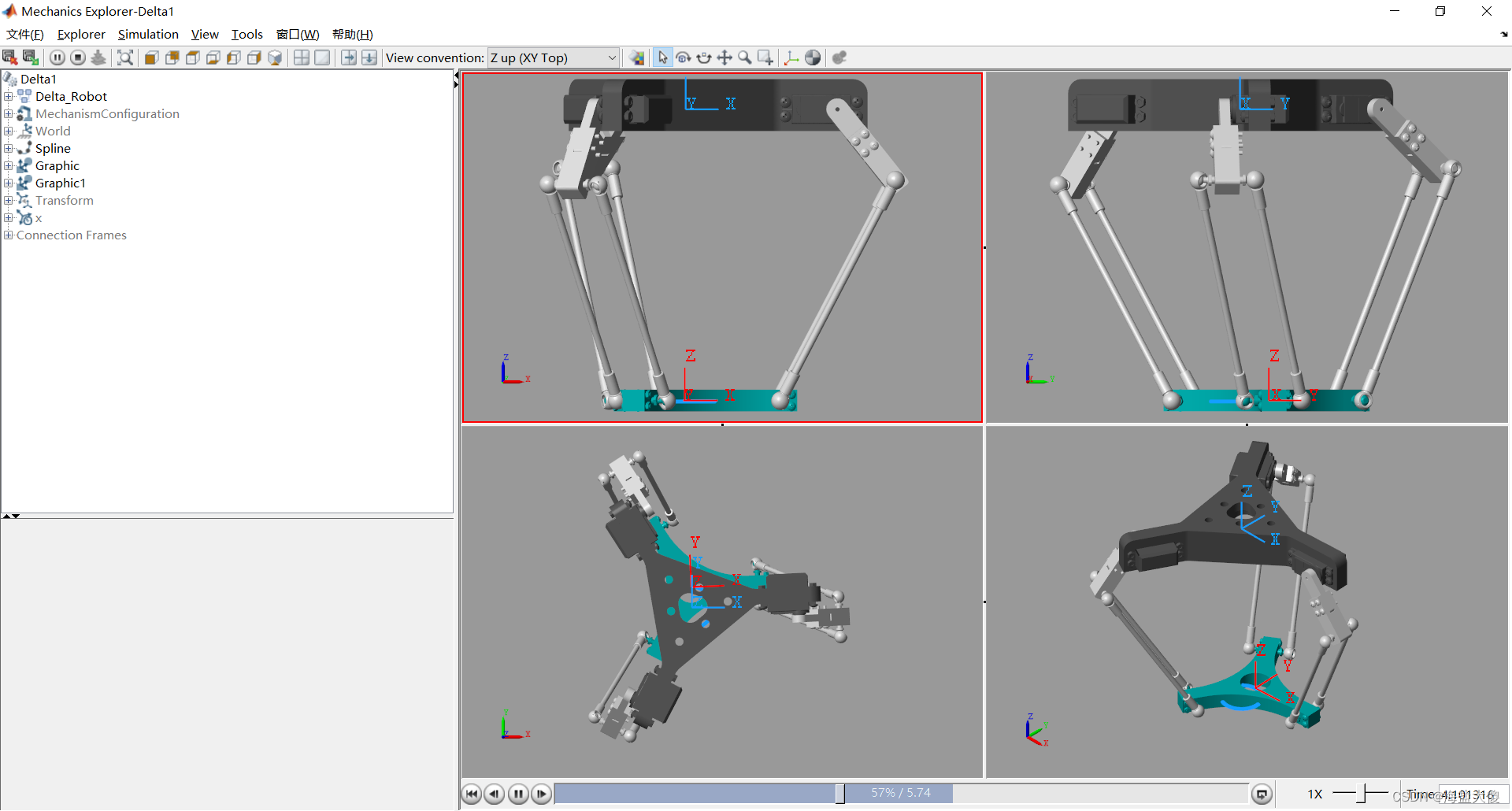
四、matlab仿真


















 1681
1681

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









