






目录
1.概念
正向运动学(Forward kinematics, FK):利用机器人运动学方程,根据关节的特定参数计算末端受动器(end effector)的位置。正向运动学要求用户为所有涉及的关节设置参数。
逆向运动学(Inverse kinematics, IK):流程与FK相反,利用机器人运动学方程来确定机械手的关节参数,使末端受动器移动到期望的位置。末端受动器可以是关节(如手和脚),也可以是内部关节(如手肘和膝盖),不一定位于末端。IK最早出现在机器人学技术中,现在在许多领域都有应用,比如:工程学、计算机图形学、电子游戏、CG动画。
关于末端受动器:机械手臂抓取末端受动器的位置、角色开门时手的位置、角色行走时脚的位置,这些可以称为末端受动器。
2.IK问题分析
IK可能有一个解、多个解或无解。
IK问题解决有两步比较重要:
- 一:分析目标是可达还是不可达。检查目标是否在可达范围内是很重要的,因为避免寻找不存在的解决方案,可以节省大量的处理时间。末端受动器能够到达的目标空间称为可达工作空间。
- 二:当存在解决方案且没有达到解决方案时,需要添加终止条件来避免在迭代过程中进入无限循环的情况。比如:限制迭代次数、当末端受动器在前一次迭代和当前迭代时的位置差小于指定的公差时终止IK解算器(IK solvers)的计算。
要令IK发挥最好的效果,开始时骨骼最好摆出接近目标的姿势。这样有助于算法专注最接近的解,并能在合理的时间内完成计算。可用解的数量取决于目标位置或运动链的自由度。目标不可达的IK问题被称为过度约束问题。当目标可达时,两个或多个链可能存在多个解决方案。这使得IK问题不受约束(或冗余)——它可能有无限多的解决方案来满足期望的目标。
3.IK求解
反向动力学的实现方法有很多种,常见的有 CCD(循环坐标下降法),FABR(前向和后向法),本文只说明反向动力学的基本方法。
1.从最小子骨骼开始遍历并趋近目标
2.每个骨骼都将其子骨骼的轴点作为跟随点(最小子骨骼无子节点需直接跟随目标点),开始趋近
3.骨骼跟随方法为,以自身轴点与目标点的方向为骨骼变换方向,并将骨骼终点与目标点对齐
从目标点(X)开始求解,并从链式结构的“叶节点”到“根节点”逐渐将整个链式结构趋近目标位置。
范例:
构建链式结构:[P2,P1]、[P3,P2]、[P4,P3],其长度分别为d1,d2,d3
(A)从尾端开始,以[P4,P3]开始逼近 X点,
(B)d3趋近,连接[P3, X], 将[P4,P3]移动至[P4‘,P3’],P4’ == X
(C)d2趋近,连接[P2, P3’],将[P3,P2]移动至[P3’,P2’]
(D)d1趋近,连接[P1, P2’],将[P2,P1]移动至[P2’,P1‘]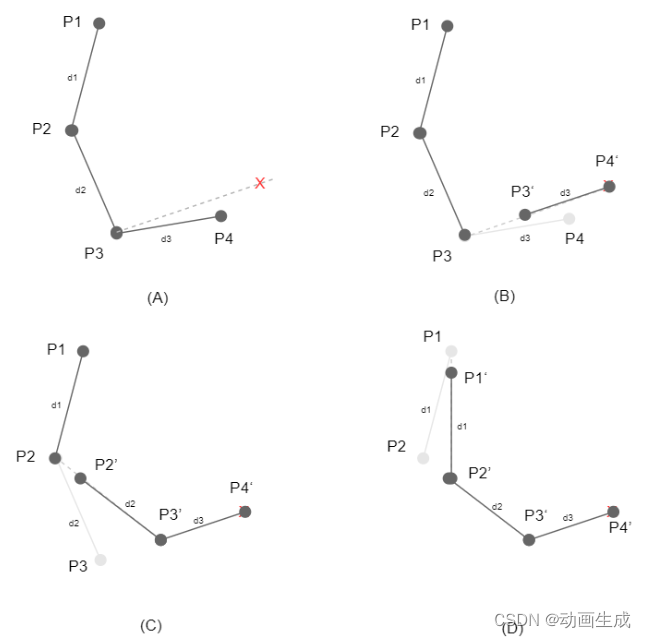
角度限制
特殊情况下,得到运动的形状还不够,还需要进行一定的运动限制,现实中每一根骨骼在运动的过程中往往都会受到铰连接,带来的运动角度限制!
在链式结构跟随目标点运动时每个骨骼的运动角度都是相对的,即每个骨骼的角度限制都是以其子骨骼为相对方向(与子骨骼世界方向相同时角度为0°,相反时为180°或-180°),那么自然叶子节点因为没有子骨骼就没有什么限制(你要想有的话也可以有的,我这里不做实现)。
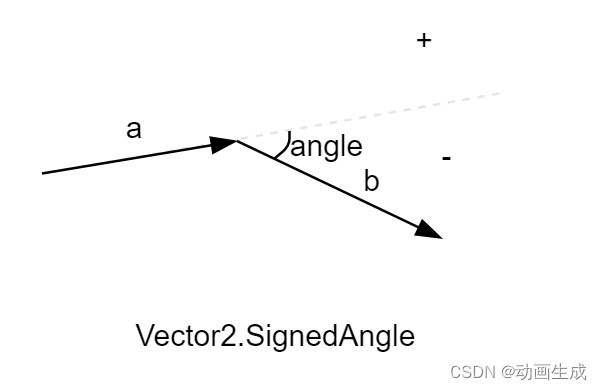
下图:
a为父骨骼,b 为子骨骼,那么,a的限制角度计算方式就为,a方向 旋转到 b方向 的角度为准,范围为(-180,180),角度的限制在跟随的过程中计算即可。
4.实现代码:
Segment 类
public class Segment
{
public float len; //线段长度
public Vector2 angleLimt = new Vector2(-180f, 180f); //角度限制范围
public Color color = Color.white; //Gizmo color
public Vector2 a { get; private set; } //线段起点
public Vector2 b { get; private set; } //线段终点
public Vector2 forward { get { return (b - a).normalized; } } //线段终点方向
/// <summary>
/// 跟随目标节点,并计算自身位置
/// </summary>
/// <param name="target">目标点位置</param>
/// <param name="prevDir">上一线段的方向</param>
/// <param name="limt">是否使用角度限制</param>
/// <param name="isForward">是否将线段终点作为向前方向</param>
public void Follow(Vector2 target, Vector2 prevDir, Vector2 limt, bool isForward = true)
{
if (isForward)
{
a = -(target - a).normalized * len + target;
b = target;
}
else
{
a = target;
b = -(target - b).normalized * len + target;
}
if (limt.x != -180 || limt.y != 180) LimtAngle(prevDir, limt, isForward);
}
/// <summary>
/// 角度限制
/// </summary>
/// <param name="prevDir">上一线段的方向</param>
/// <param name="limt">角度的限制范围</param>
/// <param name="isForward">是否将线段终点作为向前方向</param>
private void LimtAngle(Vector2 prevDir, Vector2 limt, bool isForward = true)
{
float angle = Vector2.SignedAngle(prevDir, forward);
if (isForward)
{
if (-angle < limt.x)
{
a = -Rotate(prevDir, -limt.x) * len + b;
}
else if (-angle > limt.y)
{
a = -Rotate(prevDir, -limt.y) * len + b;
}
}
else
{
if (angle < limt.x)
{
b = Rotate(prevDir, limt.x) * len + a;
}
else if (angle > limt.y)
{
b = Rotate(prevDir, limt.y) * len + a;
}
}
}
/// <summary>
/// 返回旋转后的角度
/// </summary>
/// <param name="v">normal</param>
/// <param name="a">rad</param>
private Vector2 Rotate(Vector2 v, float a)
{
a = a * Mathf.Deg2Rad + Mathf.Atan2(v.y, v.x);
return new Vector2(Mathf.Cos(a), Mathf.Sin(a));
}
}
IKSolverSimp 类
public class IKSolverSimp {
public Segment[] segments = new Segment[] { };
public Vector2 target; //目标位置
public bool useLimt = false; //是否启用角度限制
/// <summary>
/// 以线段的起点为正方向,开始趋近目标
/// </summary>
public void CalculateForback()
{
segments[0].Follow(target, Vector2.zero, useLimt ? Vector2.zero : new Vector2(-180,180), false);
for (int i = 1; i < segments.Length; i++)
{
segments[i].Follow(segments[i - 1].b, segments[i - 1].forward, useLimt ? segments[i].angleLimt : new Vector2(-180, 180), false);
}
}
/// <summary>
/// 以线段的终点为正方向,开始趋近目标
/// </summary>
public void CalculateForward()
{
segments[segments.Length - 1].Follow(target, Vector2.zero, useLimt ? Vector2.zero : new Vector2(-180, 180), true);
for (int i = segments.Length - 2; i > -1; i--)
{
segments[i].Follow(segments[i + 1].a, segments[i + 1].forward, useLimt ? segments[i + 1].angleLimt : new Vector2(-180, 180), true);
}
}
}
SimpIKTest 类
public class SimpIKTest : MonoBehaviour
{
public IKSolverSimp iKSolverSimp; //简单解算器
public Transform targetP; //目标点位置
public bool useLimt = true; //使用限制
public bool update = false; //实时更新
public bool isHeadFollow = true; //线段起点为正方向
[Button("Calculate")] //需要插件:Sirenix.OdinInspector;或替换为[ContextMenu("Calculate")]
void Calculate()
{
iKSolverSimp.useLimt = useLimt;
iKSolverSimp.target = targetP.position;
if (isHeadFollow)
{
iKSolverSimp.CalculateForback();
}
else
{
iKSolverSimp.CalculateForward();
}
}
private void OnDrawGizmos()
{
if (targetP == null) return;
if (update) Calculate();
Segment last = null;
foreach (var item in iKSolverSimp.segments)
{
Gizmos.color = item.color;
Mov.GizmeDrawArrow(item.a, item.b);
if (useLimt && last != null)
{
Mov.GizmeDrawCircleLimt(item.a, (item.b - item.a).normalized, item.angleLimt, 0, item.len / 4f, last.a);
}
last = item;
}
}
}
public static class Mov{
public static Vector2 Rotate(Vector2 v, float a)
{
Vector2 n = v.normalized;
a += Mathf.Atan2(n.y, n.x);
return new Vector2(Mathf.Cos(a),Mathf.Sin(a)) * v.magnitude;
}
public static void GizmeDrawArrow(Vector2 a, Vector2 b)
{
Vector2 dir = (a - b).normalized;
float l = (a - b).magnitude * 0.2f;
Vector2 u = Rotate(dir, 30 * Mathf.Deg2Rad) * l;
Vector2 d = Rotate(dir, -30 * Mathf.Deg2Rad) * l;
Gizmos.DrawLine(a, b);
Gizmos.DrawLine(b, b + u);
Gizmos.DrawLine(b, b + d);
}
public static void GizmeDrawCircleLimt(Vector2 anchor, Vector2 right, Vector2 limt, float angleOff, float len, Vector2 anchor2)
{
Vector2 dir = right * len;
Vector2 a, b, c;
a = anchor;
b = a + Rotate(dir, -(limt.x + angleOff) * Mathf.Deg2Rad);
c = a + Rotate(dir, -(limt.y + angleOff) * Mathf.Deg2Rad);
Color green = new Color(0, 1, 1, .3f);
Color blue = new Color(0, 0, 1, .3f);
Color white = new Color(1, 1, 1, .3f);
Color black = new Color(0, 0, 0, .3f);
Gizmos.color = green;
Gizmos.DrawLine(a, b);
Gizmos.color = blue;
Gizmos.DrawLine(a, c);
Vector2 s = b - a;
float rad = (limt.y - limt.x) * Mathf.Deg2Rad;
for (float i = 0; i < 1f; i += 0.1f)
{
Gizmos.color = Color.Lerp(green, black, i);
Gizmos.DrawLine(a + Mov.Rotate(s, -i * rad), a + Mov.Rotate(s, -(i + 0.1f) * rad));
}
if (anchor != anchor2)
{
Gizmos.color = white;
Gizmos.DrawLine(a, a + (a - anchor2).normalized * len * 1.05f);
}
}
}
效果演示(角度限制与无限制)















 1084
1084











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









