






1.环境:ubuntu18.04;ros1-melodic。
2.进入桌面新建一个文件夹,再到文件夹下建一个src文件夹。
3.在文件夹下打开终端输入,生成build和devel文件夹。
catkin_make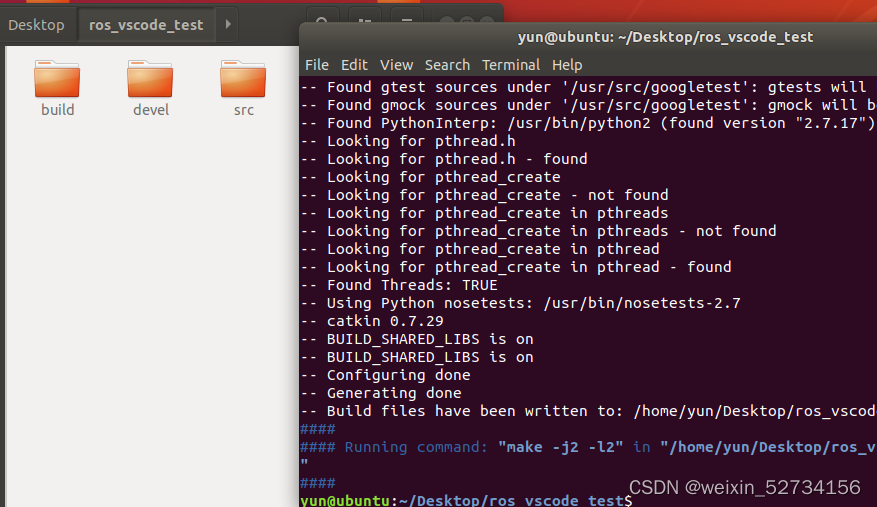
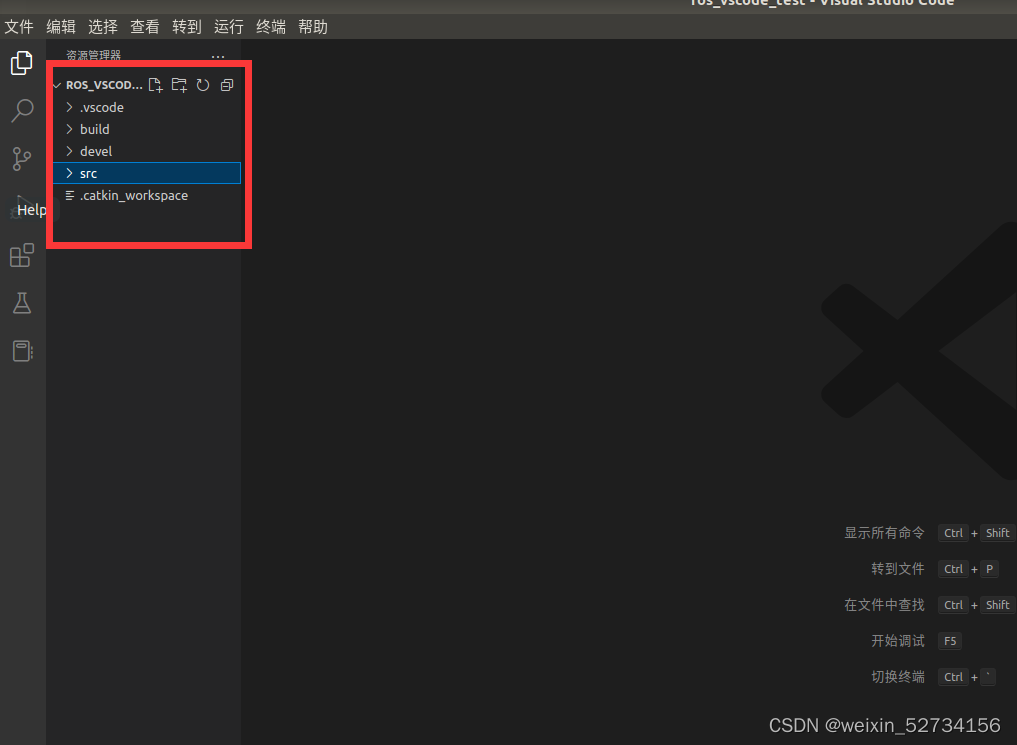
4.打开vscode然后打开这个文件夹。

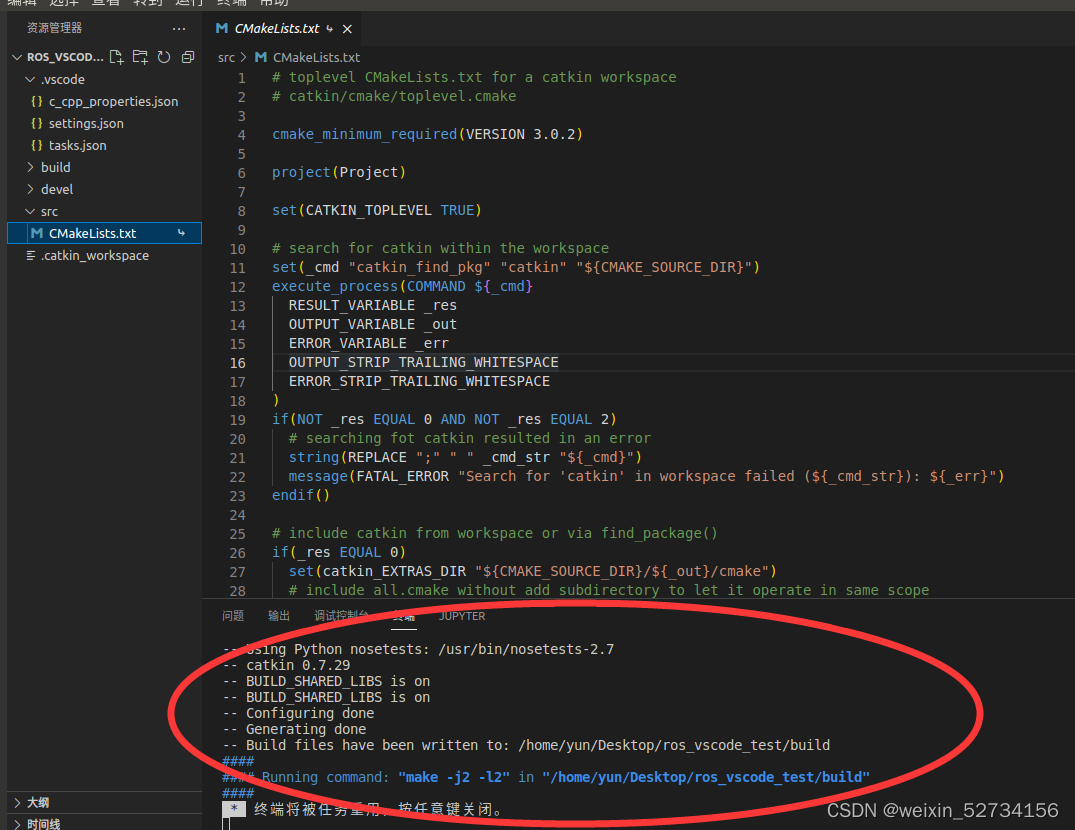
5.我们先试着编译一下,看看有没有错,按ctrl+shift+b。(首先要装好插件:c/c++,ros,cmake tools,python)
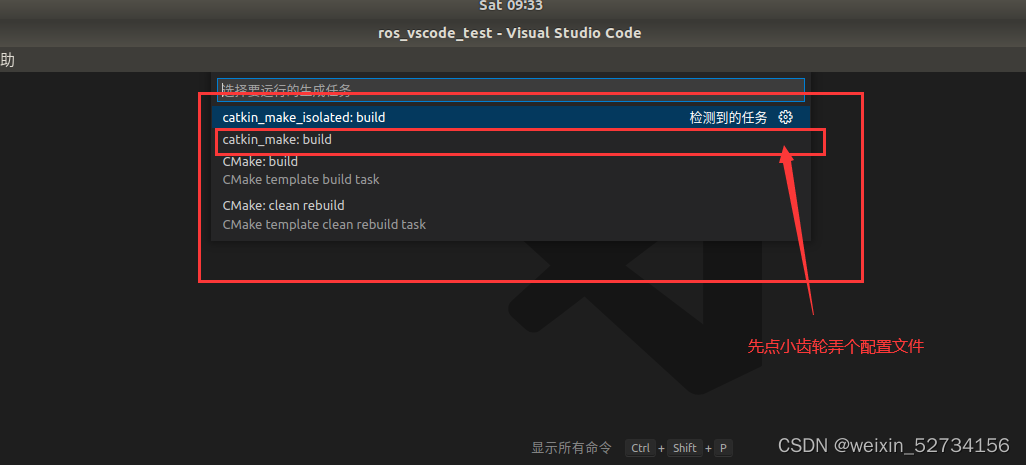
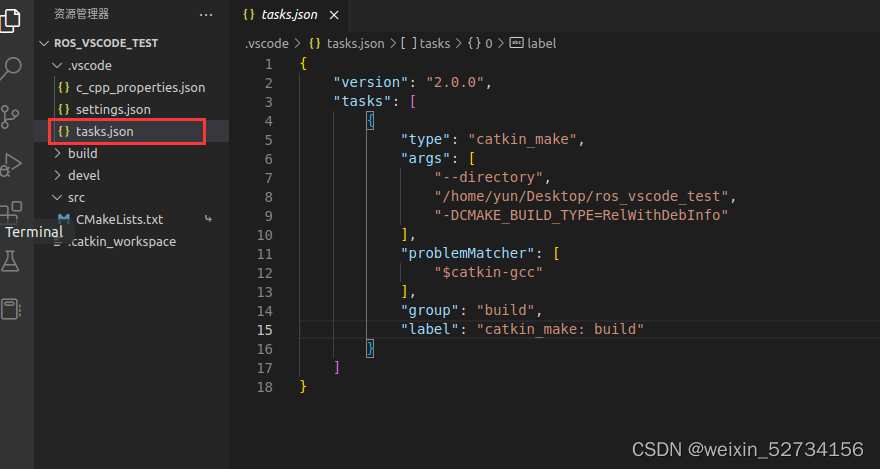
再按ctrl+shift+b编译一下,如果没有报错就是对的。
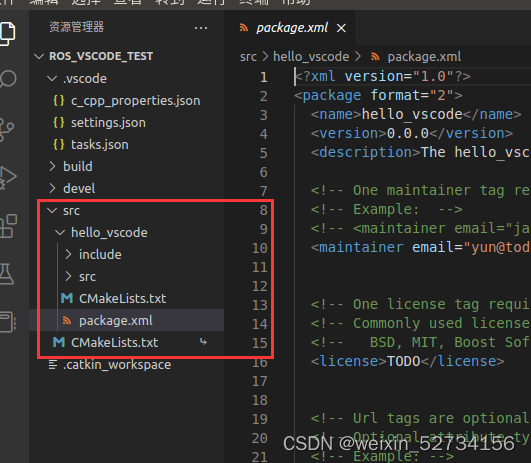
6.在src文件夹右键,建一个包,然后输入包名 。
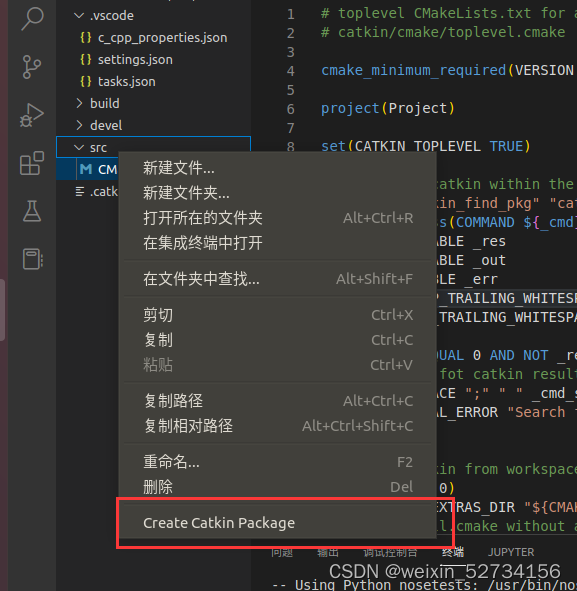
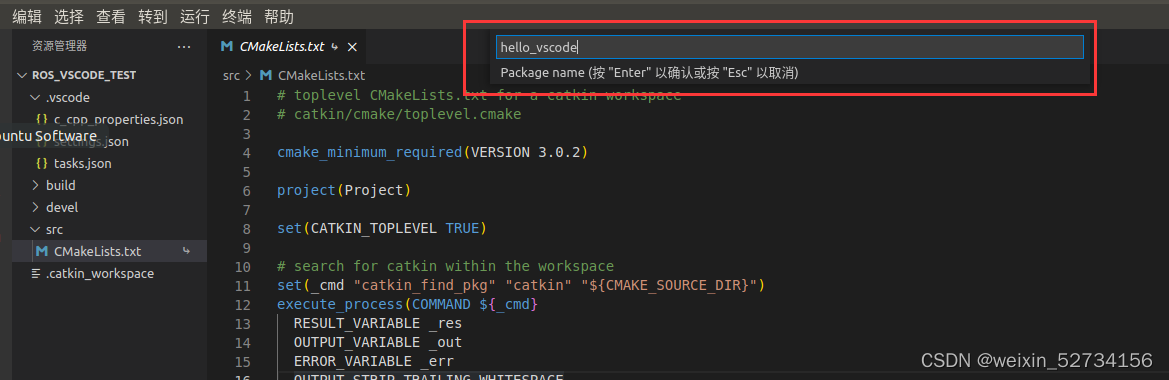
然后添加依赖:
7. 到新生成的src文件夹下建一个cpp文件,输入一段经典测试代码。
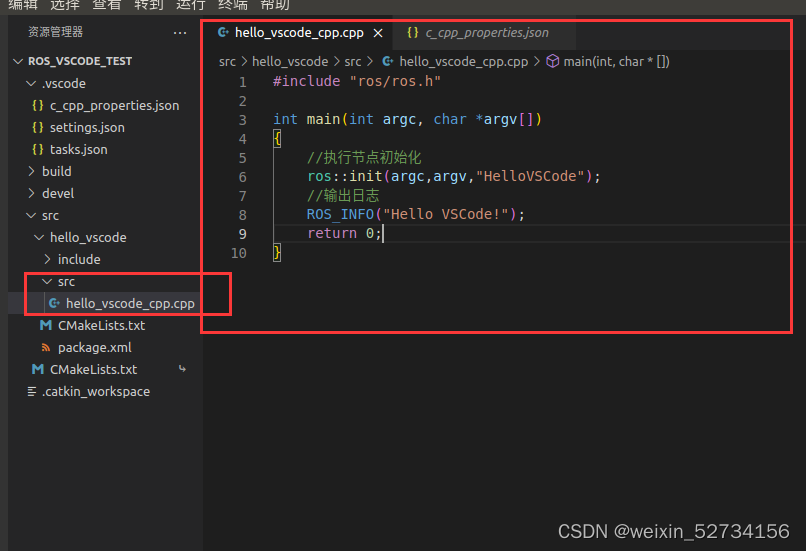
ctrl+shift+b编译一下看看有没有错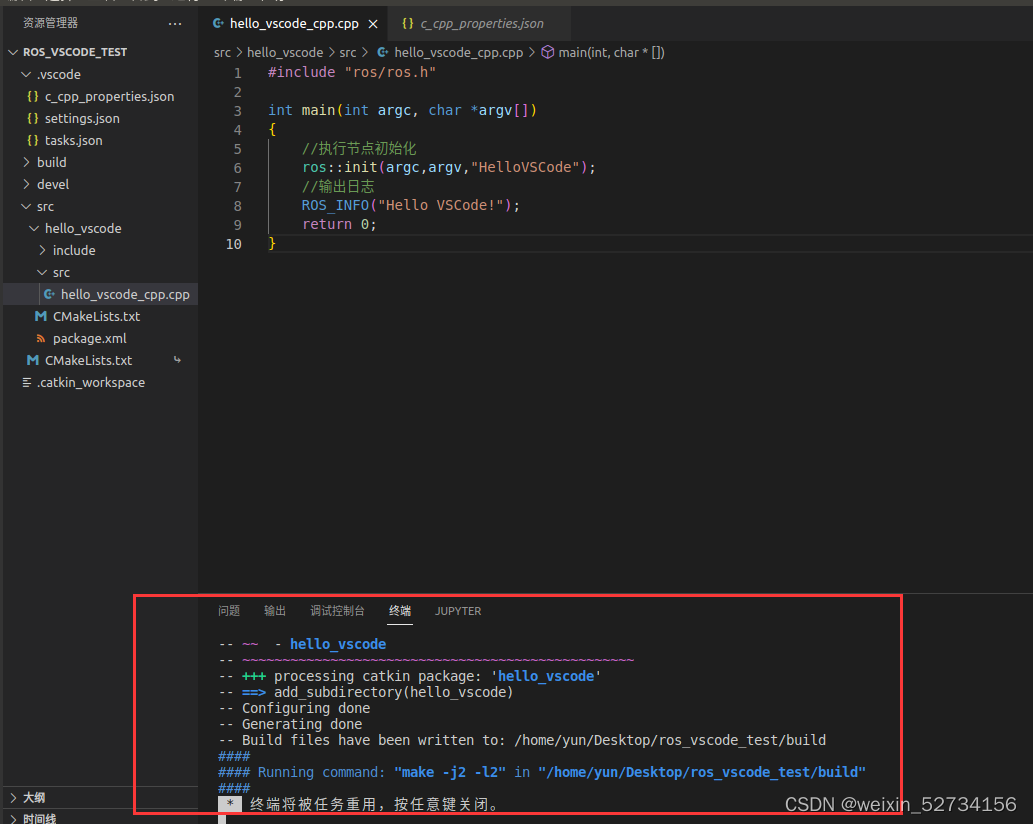 8.修改Cmakelists.txt文件
8.修改Cmakelists.txt文件
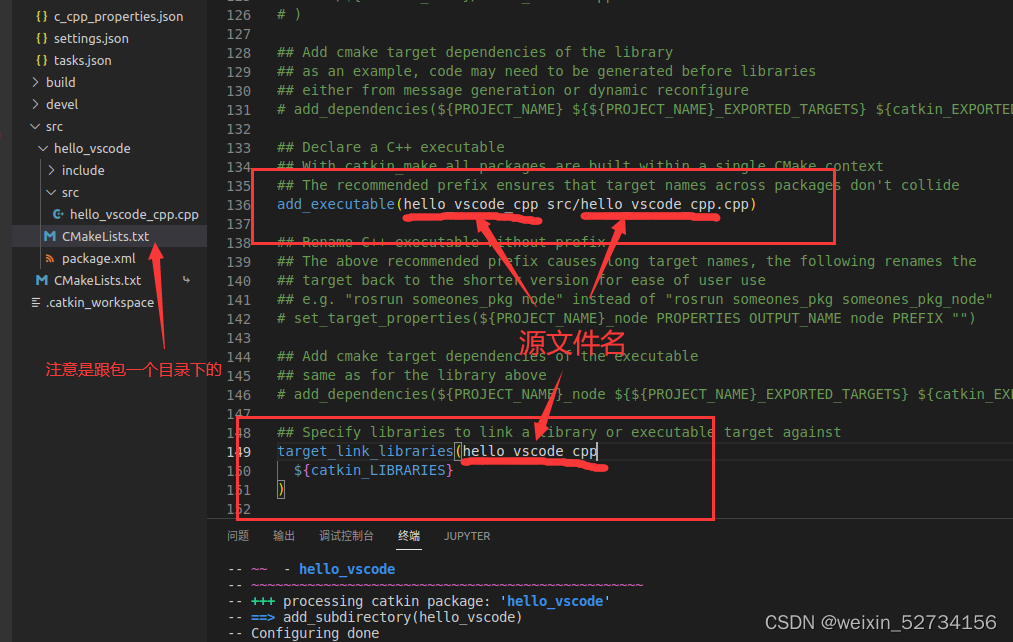
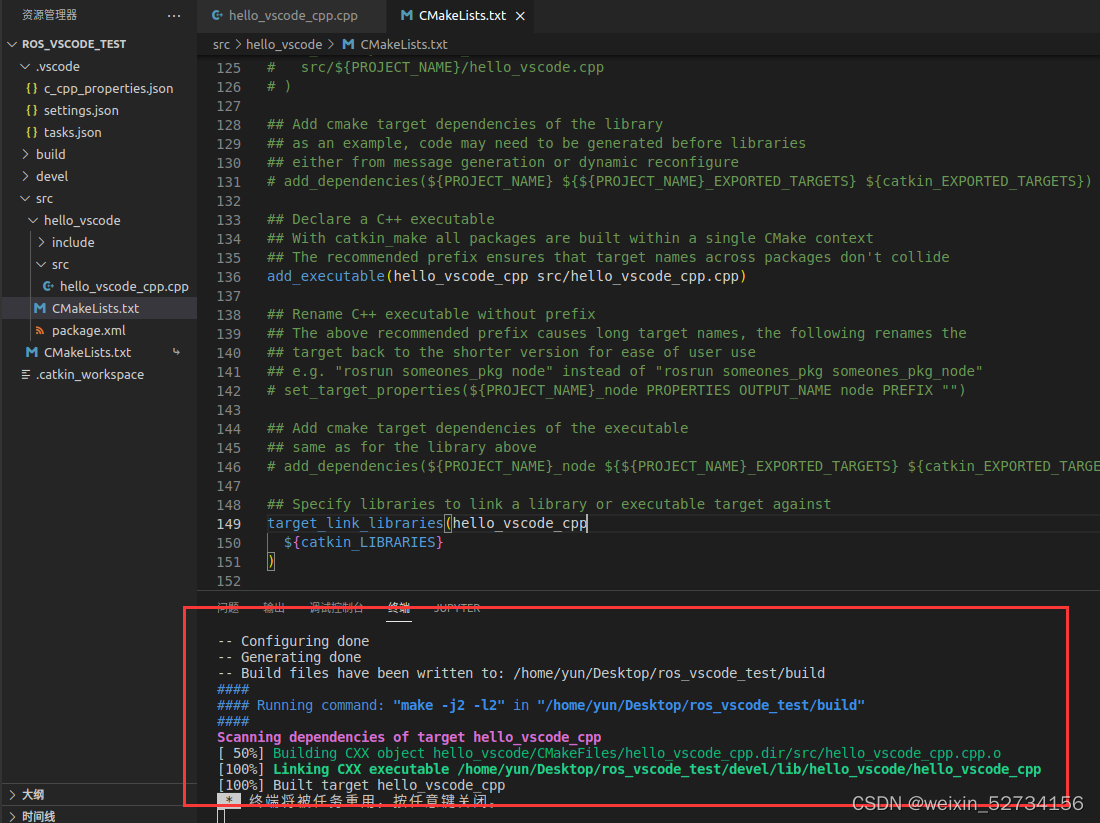
9.ctrl+shift+b编译一下
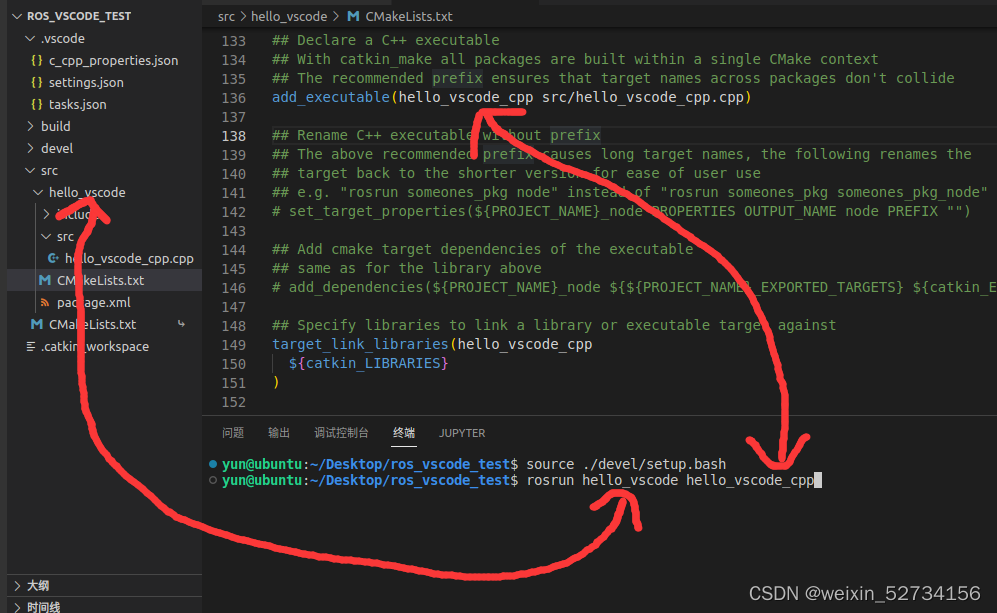
10.编译好之后新建一个终端启动roscore

启动之后在建一个终端运行这个包
经典测试程序就完成了,也创建了一个基础的ros功能包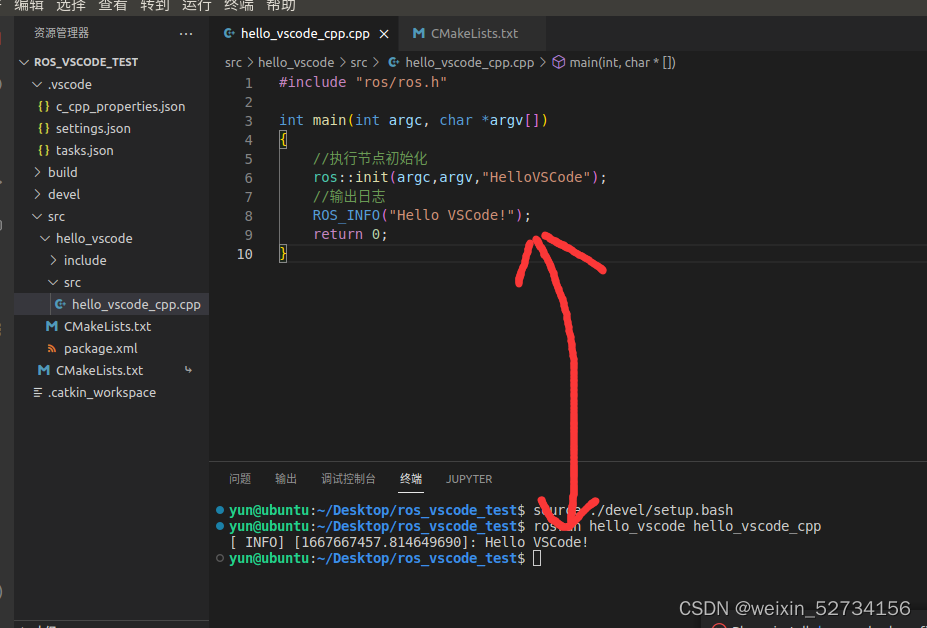
总结:用vscode创建了一个ros功能包,并在VScode下运行这个节点
















 1569
1569











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









