






我的版本信息Ubuntu16.04+RosKinetic
在搞slam的过程中遇到了很多问题在csdn上都找到了解决方法,所以希望能将过程和问题总结出来与大家共同学习,如有错误恳请大家批评指正,谢谢!
把大象放进冰箱需要三步,所以使用激光雷达也需要三步:
1、安装驱动
2、配置ip地址
3、启动节点
第一步,安装驱动。因为我后面要跑lio-sam需要拿到线号ring和时间戳timestamp所以需要安装最新的驱动,之前版本的驱动是没有r、t参数的(新老版本发布的点类型如下)

下面开始进入正题---------------------Alt+Ctrl+T打开一个新终端------------------------------------------------
1.1安装依赖
sudo apt-get install libpcap-dev1.2创建工作空间
mkdir -p robosense_ws
cd robosense_ws/
mkdir src
cd src/
catkin_init_workspace
cd ..
catkin_make1.3下载sdk
cd src/
git clone https://github.com/BluewhaleRobot/ros_rslidar_robosense.git1.4为文件添加执行权限
cd ~/robosense_ws/src/ros_rslidar/rslidar_drvier
chmod 777 cfg/*
cd ~/robosense_ws/src/ros_rslidar/rslidar_pointcloud
chmod 777 cfg/*1.5编译
在robosense_ws工作空间下
catkin_make第二步,配置ip地址
robosense16出厂默认ip地址是192.168.1.200,你需要将你的计算机ip设置为前三段与雷达相同即192.168.1.开头,最后一位取0-255之间不与雷达的ip相同即可。(例我的雷达ip是10.7.5.100我计算机是10.7.5.88)
2.1方法1
点击 setting---hardware---network(配置ip的时候需要将雷达连接好并上电,我的工控有多个网口有上下箭头的表示有设备在用这个网口。如果你笔记本只有一个网口,打开页面应该只有一个Wired直接点Options设置即可)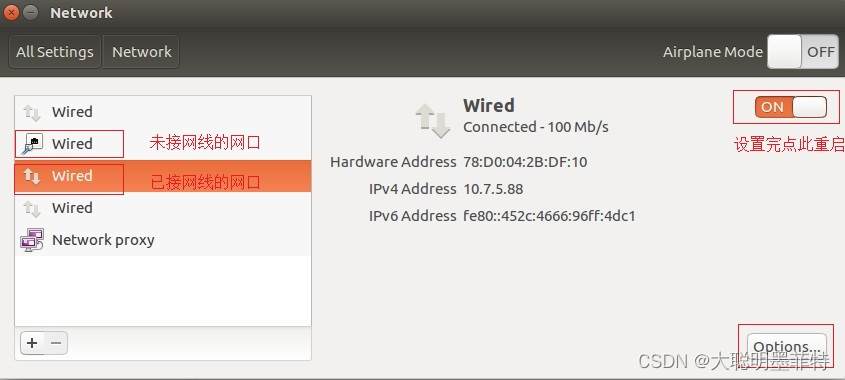
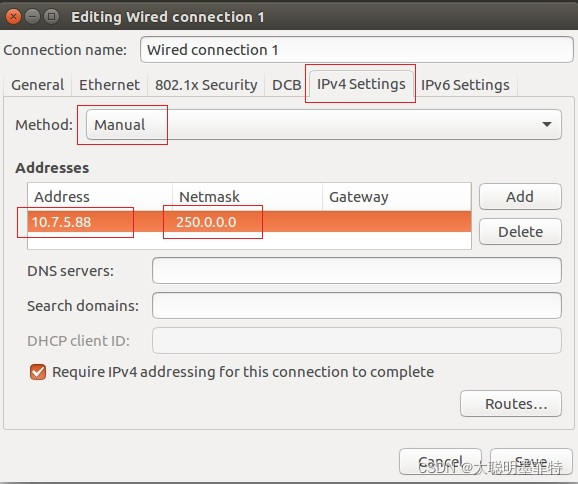
点击 IPv4 Settings---Manual (如果你的雷达ip是192.168.1.200你就如下设置:
Address=192.168.1.1 Netmask=255.255.255.0 Gateway不需要设置)然后点击save后重启网口
如果能ping通就说明没问题 Alt+Ctrl+T新开终端
ping 192.168.1.200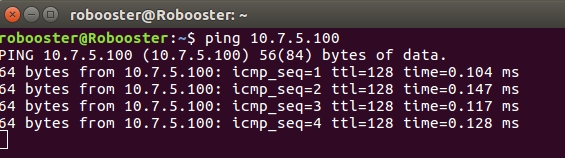
方法2(该方法是一次性的电脑重启后就失效)
查看网口名称 Alt+Ctrl+T新开终端
ifconfig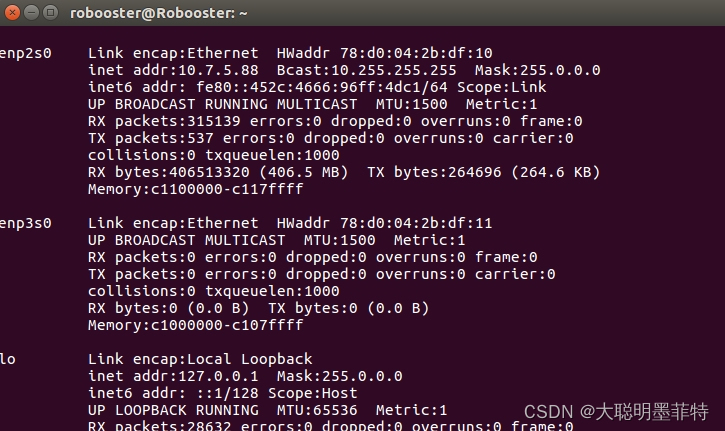
我接雷达的网口名称为enp2s0,你需要将下面的网口换成你自己网口的名称 ,执行完命令后如果能ping通说明设置完毕
sudo ifconfig enp2s0 10.7.5.88 netmask 255.0.0.0第三步,启动节点 Alt+Ctrl+T新开终端
cd ~/robosense_ws
source devel/setup.bash
roslaunch rslidar_pointcloud rs_lidar_16.launch你就能看见雷达看见的了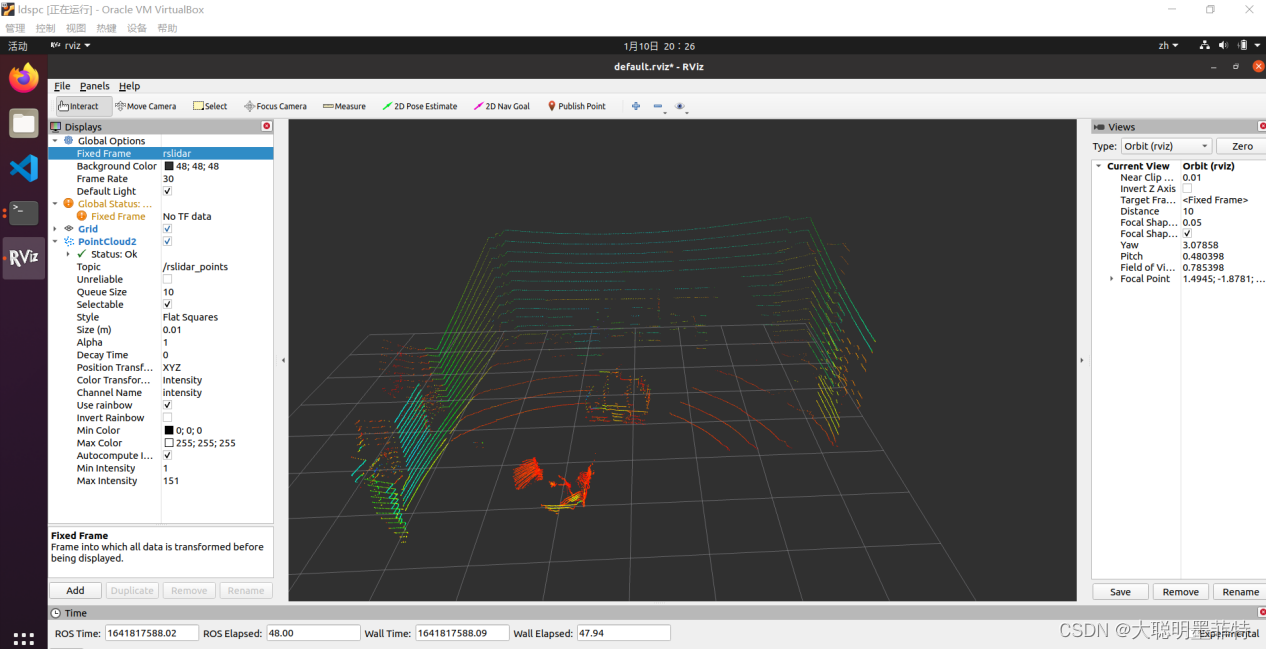

















 430
430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









