







 本文介绍了多机器人协同在制导律中的应用,特别是分布式时间协同制导律(DCG),它基于比例导引律,具有结构简单、分布式控制和鲁棒性等特点,适用于多车辆同步到达任务。文中通过仿真展示了DCG的有效性和优势。
本文介绍了多机器人协同在制导律中的应用,特别是分布式时间协同制导律(DCG),它基于比例导引律,具有结构简单、分布式控制和鲁棒性等特点,适用于多车辆同步到达任务。文中通过仿真展示了DCG的有效性和优势。
多机器人协同是当今移动机器人领域的研究热点之一,相比于单个机器人,多机器人系统在复杂动态环境下进行任务时,具有环境适应能力强、工作效率高、鲁棒性较好等优点,如图1示意多地面移动机器人协同场景。本节文章给大家介绍一下多智能体控制在制导律中的应用,先依次从三方面:1. 制导律介绍;2. 一致性说明;3. 分布式控制介绍,并结合一篇论文讲解如何通过以上三方面应用在制导律中。
01
概念介绍
01
什么是制导律?
首先,制导律(guidance law)定义:指依据导航信息计算如无人机等飞行器的运行路径,使其能有效到达目标点的算法。常见的制导律包括比例导引(PNG)、协同导引等。可理解为将飞行器制导律类比到移动机器人,有些类似路径或运动规划,本质目的都是控制机器人按导航信息到达目标点。那为什么能将多智能体控制应用到制导律中呢?因为制导过程我们关心更多的是飞行器位置,并非其姿态,因此可将飞行器视作质点;而控制有时则往往将飞行器当作刚体,会有更多的可控制量,比如:位置、姿态、时间等,如图2示意多无人机协同围捕场景。

图1. 多地面移动机器人协同场景(来自知乎:@堂博主)
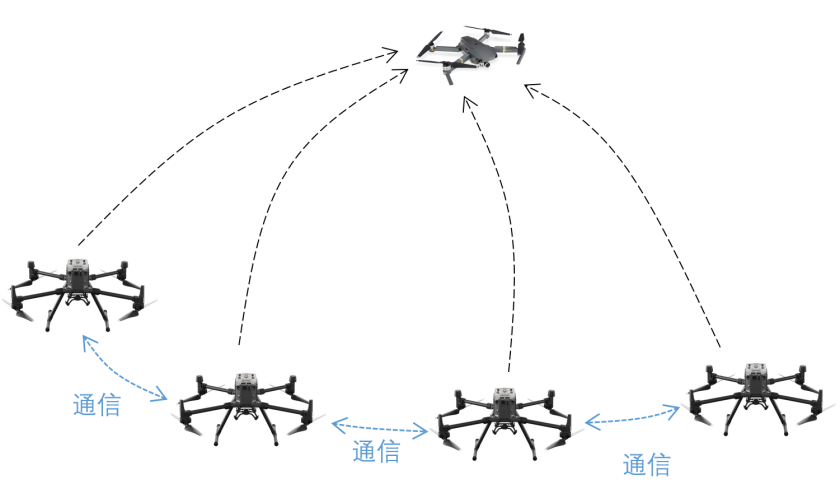
图2. 多无人机协同围捕场景
02
一致性介绍
所谓一致性是指随时间演化多智能体系统中所有智能体的某一状态趋于一致,描述了每个智能体和相邻的其他智能体信息交换的过程,智能体之间协同控制的一个首要目标就是多个智能体达到一致。
03
分布式控制介绍
上面的一致性研究的是多智能体系统,其本身是一种分布式控制(distributed control),那什么是分布式控制呢?这时需要和集中式、分散式控制进行对比(如图3所示)。可用一简单的例子解释:集中式控制将整个系统看做一个人作为一个个体, 控制中心为人的大脑,传感器为人的五官和皮肤,执行器则是四肢,一旦人的大脑受到损害,则人这个系统也是处于瘫痪状态;分散式则把整个系统划分成不同人群,不同的小群体各自执行各自的任务;而分布式是将一群人中的每个人视作单独个体,每个人与其邻居交换信息,最终整个人群协同完成任务。
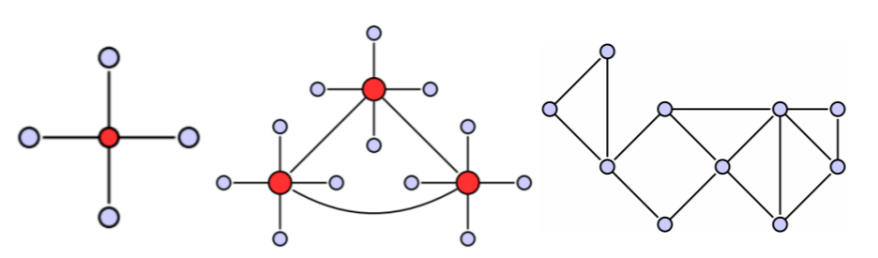
图3 .集中式、分散式、分布式结构对比(论文[3])
02
基于一致性算法的分布式时间协同制导律
将协同控制应用在时间协同制导律中,采用协同控制方式是为了完成某些特定的协同任务,比如多机器人时间协同(同时到达目标)、队形协同(保持一定队形)、角度协同(不同约束角度到达),为了完成时间协同,通过一致性算法,各机器人相互通信交换信息,共同协同到达时间。同时其中没有中心控制器统一分配控制指令,因此是一种分布式控制。
论文[1]基于最经典的比例导引律(制导中机器人速度矢量的转动角速度正比于其与目标连线的转动角速度,数学描述为:),提出一种分布式时间协同制导律(DCG),属于一种扩展比例导引律,即在其基础上叠加时间协同项,结构如下:

该制导律包含两项:第一项为经典PNG用以对准目标,第二项为时间协同项用来协同各机器人时间协同。具有如下优点:
1. 该制导律本质是基于一种最常用的制导律:比例导引律,具有普适性,当时间协同后,该制导律退化为纯PNG,相对于一些在不同制导阶段需切换制导律过程的制导律,提出的这项制导律结构更简洁、更‘优美’一些;
2. 由于是分布式控制,各机器人仅需其邻居的部分信息即可进行时间协同,同时该信息在实际中容易获取,具有较高的实用性;
3. 该制导律可避免制导过程中一个数值奇异性问题(具体可详见论文[1])。
如下为提出的DCG与PNG的仿真结果对比(如图4所示),可看出DCG可实现制导时间的协同,并在各种鲁棒条件下(较大角度差异、较大时间差异、通信噪声和时延下)仍能良好的实现时间协同(更多仿真结果可详见论文[1])。

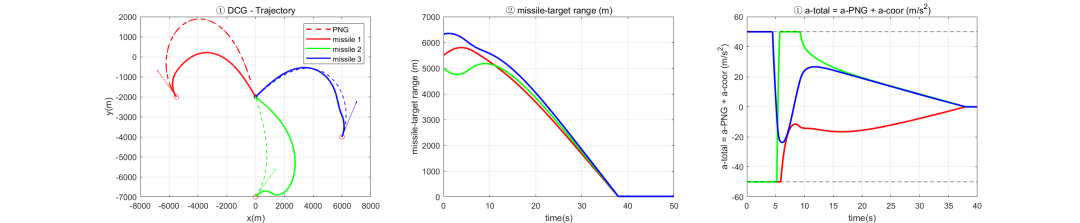
图4. DCG与PNG的仿真结果(点击查看大图)
将DCG推广到三维空间中与PNG仿真对比(如图5所示),可见DCG同样可完成对静止目标的时间协同制导任务。
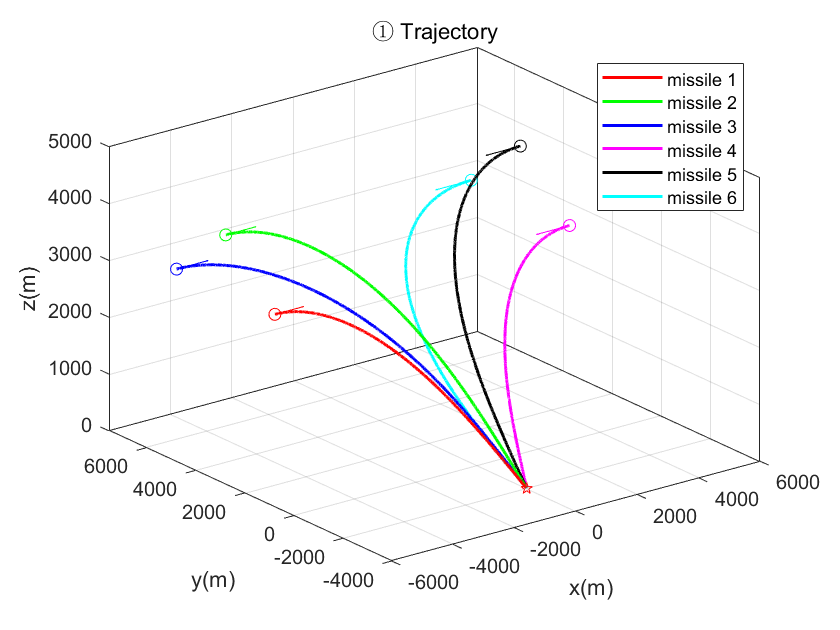
图5. 三维空间中DCG与PNG仿真对比(点击查看大图)
03
总结
该研究提出一种新型扩展比例导引律:分布式时间协同制导律,该制导律具有结构简单,是一种分布式控制而非集中式控制,可避免数值奇异点等优点,通过仿真验证了该制导律的有效性和鲁棒性。该制导律为多弹齐射场景提出一种有效的时间协同制导律,但该场景依旧有许多其他问题尚待进一步研究,比如角度协同、队形协同、目标非静止等等问题,相关领域有兴趣的大家可以一同关注呀!
更多论文详细内容请参看:K. Li, J. Wang, C.-H. Lee, R. Zhou, and S. Zhao*, "Distributed cooperative guidance for multi-vehicle simultaneous arrival without numerical singularities", AIAA Journal of Guidance Control and Dynamics, vol. 43, no. 7, pp. 1365-1372, 2020.
参考资料
[1]. K. Li, J. Wang, C.-H. Lee, R. Zhou, and S. Zhao*, "Distributed cooperative guidance for multi-vehicle simultaneous arrival without numerical singularities", AIAA Journal of Guidance Control and Dynamics, vol. 43, no. 7, pp. 1365-1372, 2020.
[2]. I. Jeon, J. Lee, and M. Tahk, "Impact-time-control guidance law for anti-ship missiles", IEEE Transactions on Control Systems Technology, vol. 14, no. 2, pp. 260-266, 2006.
[3]. F. Chen, W.Ren, "On the Control of Multi-Agent Systems: A Survey ", 2019.
[4]. Q. Zhao, X. Dong, J. Chen, Z. Xiong, Q. Li and Z. Ren, "Group cooperative guidance for multiple missiles with directed topologies," 2016 35th Chinese Control Conference (CCC), pp. 5699-5704, 2016.

















 992
992

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









