







欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本篇文章基于MATLAB导航工具箱的官方文档,详情参考A* 网格地图路径规划器 - MATLAB - MathWorks 中国
本篇文章不讲解A*算法原理,不清楚A*算法的读者请参考【自动驾驶轨迹规划之A*算法】_无意2121的博客-CSDN博客
目录
本篇文章涉及的matlab代码大多需要R2019以上的版本才能运行
1 创建一个 A* 路径规划器
planner = plannerAStarGrid
planner = plannerAStarGrid(map)
planner = plannerAStarGrid(map,Name,Value)map:是创建的对象,默认使用 10 米的宽度和高度以及每米 1 个单元格的网格分辨率,创建具有binaryOccupancyMap的地图
map=binaryOccupancyMap;%第一种
map=binaryOccupancyMap(p);%第二种
第一种就是默认的地图
第二种的p是一个存储0和1的矩阵,网格的大小与矩阵大小相匹配
这种地图的语法还有很多种,以后的文章会详细讲解
1.1 属性列举
只要没有对属性进行设置,就按默认值执行
Map:可以设置地图对象的属性值,每个网格的值指示在地图中的占用情况
planner.Map = binaryOccupancyMap(zeros(50,50));Gcost:代表任意两点之间移动的成本,默认是'Euclidean',也可以使用预定义的'Chebyshev' 'Euclidean' 'EuclideanSquared' 'Manhattan',以下两种都行
planner = plannerAStarGrid(map,'GCost','Manhattan');
planner.GCost='Manhattan';若需要自定义函数,通过函数句柄实现
planner = plannerAStarGrid(map,'GCostFcn',@(pose1,pose2)sum(abs(pose1-pose2),2));
planner.GCostFcn=@(pose1,pose2)sum(abs(pose1-pose2),2);Hcost:代表点和目标的启发式成本,与Gcost类似
TieBreaker:切换决胜局模式,调整启发式成本值在相同长度的路径之间进行选择,默认是' off '
planner = plannerAStarGrid(map,'TieBreaker','on');
planner.TieBreaker='on'DiagonaSearch:切换对角搜索模式,默认值是' on ',沿着四个方向搜索,' off '是沿着八个方向搜索
planner = plannerAStarGrid(map,'DiagonaSearch','on');
planner.DiagonaSearch='on'1.2 对象函数
plan:找到两点之间的最短无障碍路径
path=plan(planner,start,goal);%第一种
path=plan(planner,start,goal,'world');%第二种
[path,debugInfo]=plan()%第三种path是以n*2的矩阵的形式返回所有路径离散点
第一种是返回在网格坐标系下的路径离散点,原点在左上角,返回[row,column]
第二种是返回在世界坐标系下的路径离散点,原点在左下角,返回[x,y]
第三种返回的debugInfo是一个结构体(struct),属性有PathCost--路径成本,NumNodesExplored--探索的节点数,GCostMatrix--每个以探索节点的GCost
show:绘制和可视化A*探索的节点和计划的路径
show(planner);%第一种
axHandle=show(planner);%第二种
[]=show(,name,value);%第三种第一种绘制和可视化A*探索的节点和计划的路径
第二种返回绘制路径的图形的轴手柄
第三种中属性有Parent--调整绘图的一些设定,ExploresNodes--显示浏览的节点,默认值是'off'
2 举例演示
%创建一个随机生成障碍物的地图
map = mapClutter;
%创建A*规划器
planner = plannerAStarGrid(map);
%定义初始点和目标点,这里选用网格坐标系
start = [2 3];
goal = [248 248];
%在两点之间找到最短的无障碍路径
plan(planner,start,goal);
%绘制路径与探索过是节点
show(planner);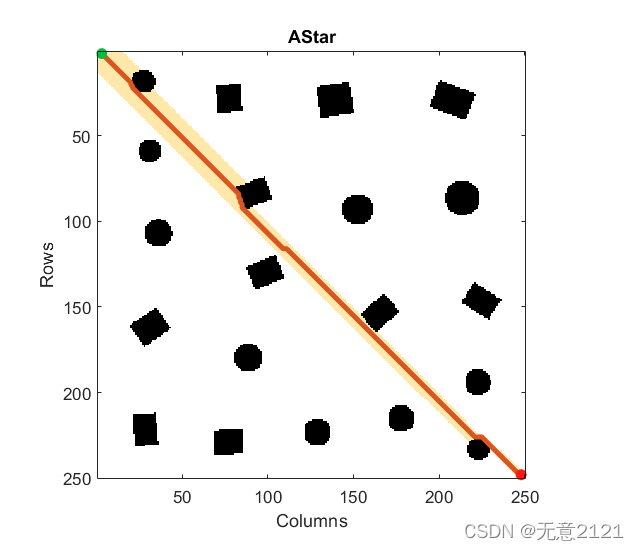
3 总结
利用 MATLAB 的导航工具箱,可以更加简洁明了地对算法进行部署。


















 2076
2076

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











