







欢迎大家关注我的B站:
偷吃薯片的Zheng同学的个人空间-偷吃薯片的Zheng同学个人主页-哔哩哔哩视频 (bilibili.com)
本文为深蓝学院《自主代客泊车理论与实践》 的学习笔记
目录
1.讲师介绍
秦通老师为华为第一批天才少年,作为感知与SLAM算法专家带领团队开发ADS1.0/ADS2.0,并应用于问界M7等主流车型

2.内容
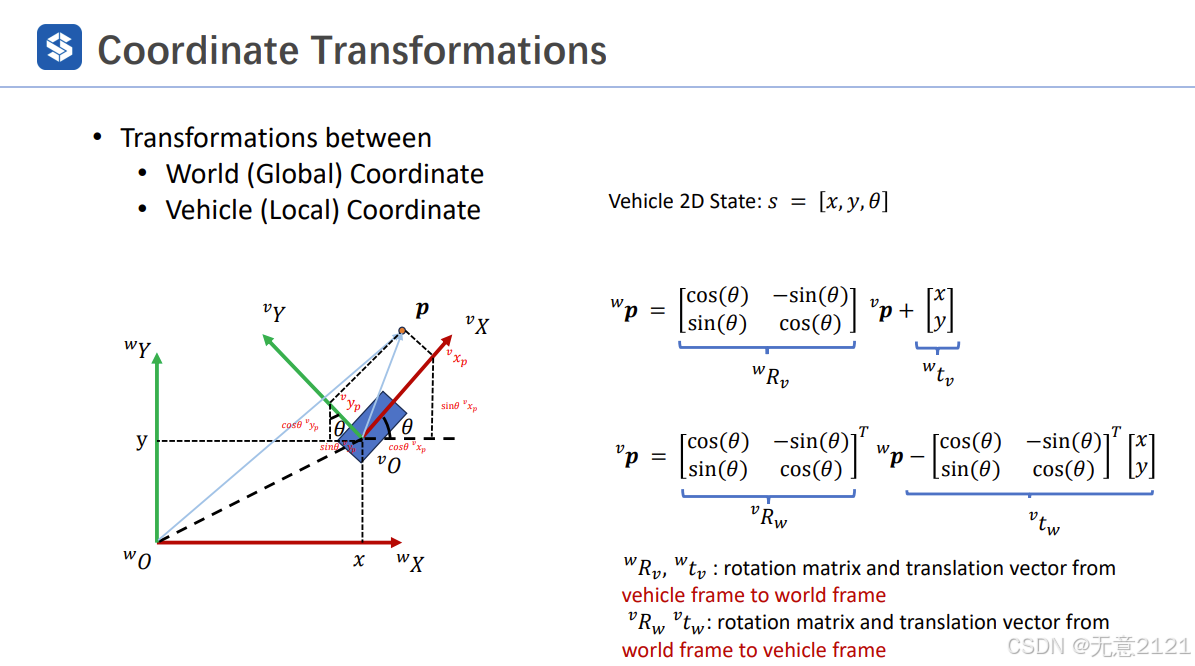
车辆坐标系和世界坐标系之间的变换:左乘旋转矩阵+平移矩阵
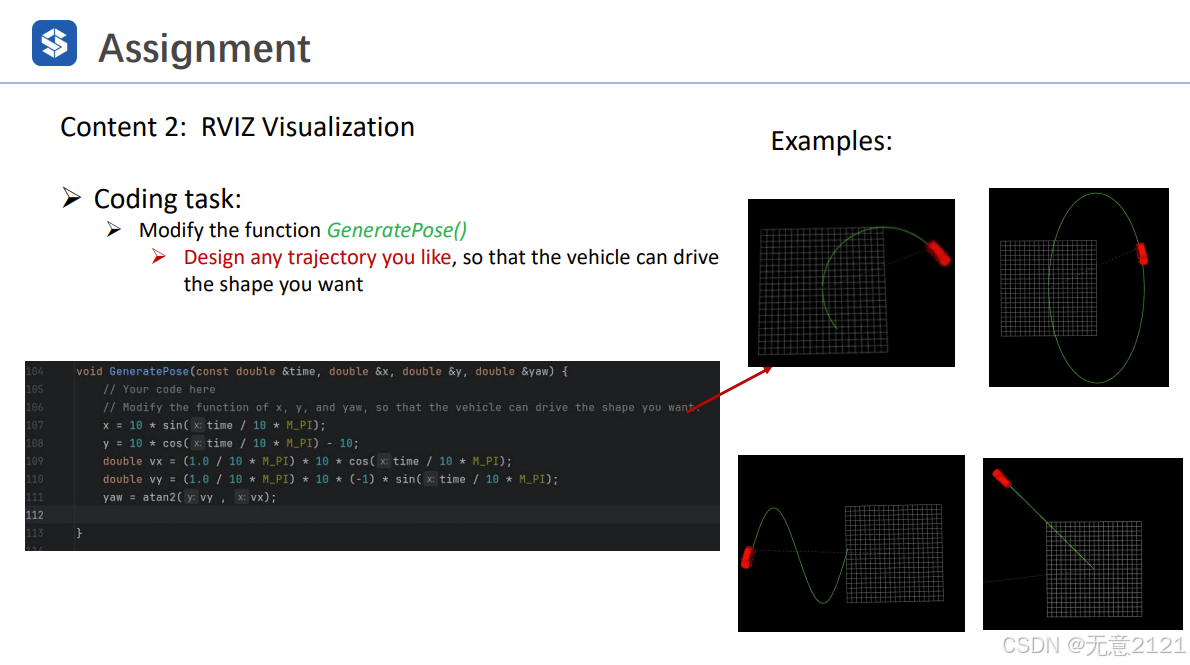
3.作业
-
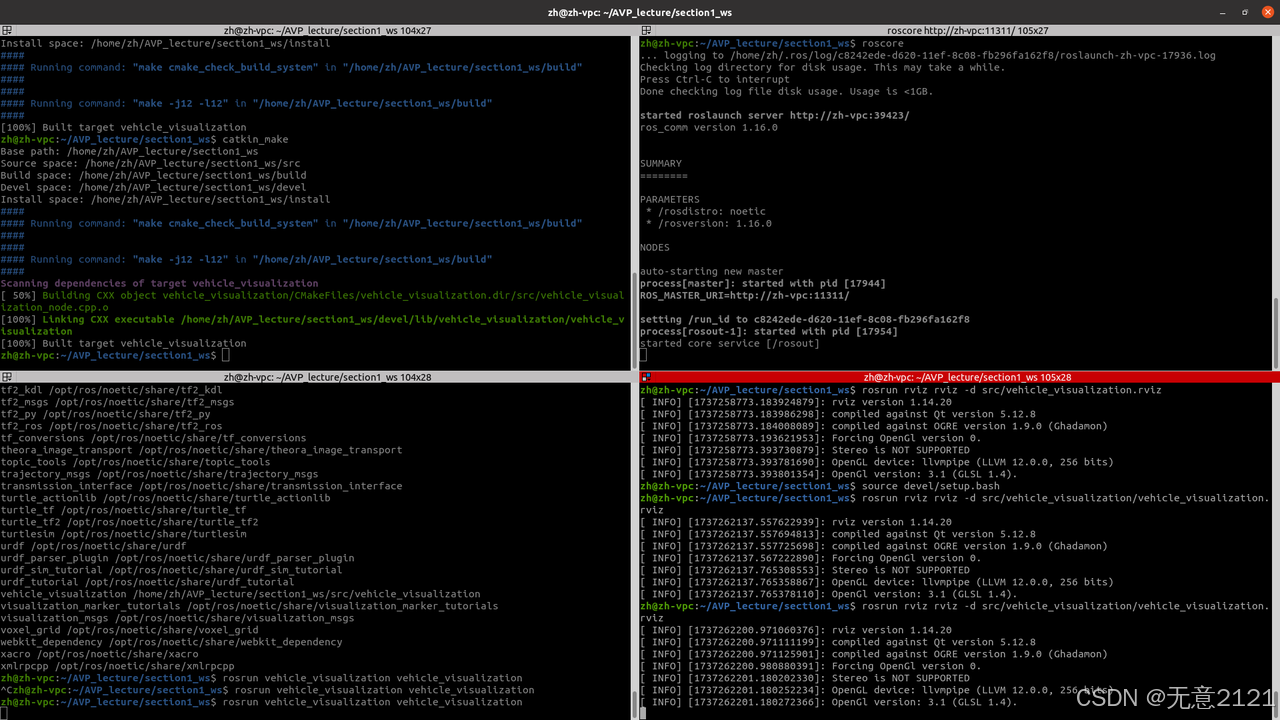
碰到了编译的问题:因为默认python在anaconda下
-
解决办法https://blog.csdn.net/weixin_44857882/article/details/124296306
-
-
source了才能让rviz中有车辆模型载入
-
需要source的情况
-
运行自定义包和节点
-
每次新打开终端
-
-
不需要source的情况
-
运行ros自带的包,如turtlesim
-
已经将source加入/.bashrc
-
-
-
不能生搬硬套
-
要看具体要执行的文件名是什么/目录是什么
-
目录细节:ws下有src/devel等,src用来存放各个package,每个packge里还有src,src用来存源代码,launch用来启动文件
-
我直接将packge里的内容放在src里了,不符合规范
-
-
x和y是车辆的坐标,通过求导得到速度分量,速度分量可以计算出车辆航向角,从而完整表征车辆模型在世界坐标系下的状态,我修改成了余弦函数,走了一个神龙摆尾
-
terminator和terminal不是一个东西
-
一个可以切屏,一个透明度高好看
-
-
Linux 命令行操作
-
./ 当前目录
-
~主目录
-
/根目录
-
pwd 查询当前目录
-
/后面可以根文件夹
-
-
效果
| 终端启动 |
|
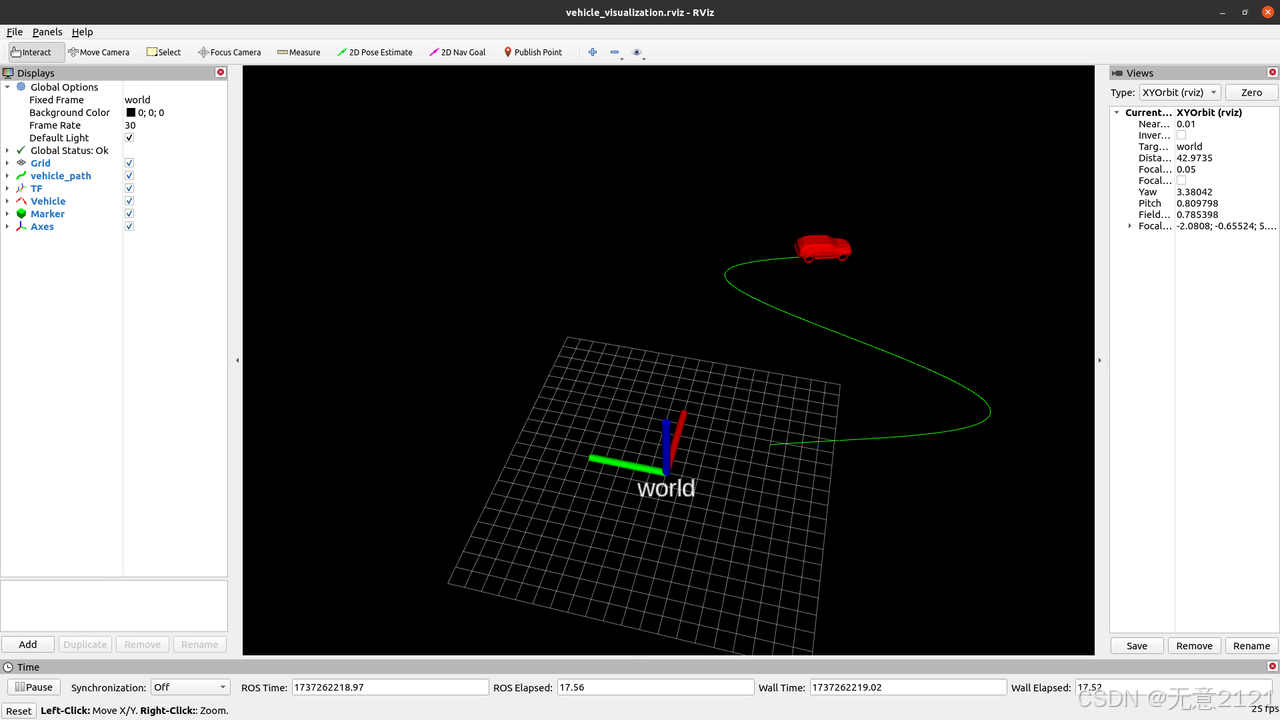
| rviz效果 |
|


















 1732
1732

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











